2022年6卷5期
显示方式: |
2022, 6(5): 745-757.
doi: 10.1093/ce/zkac040
摘要:
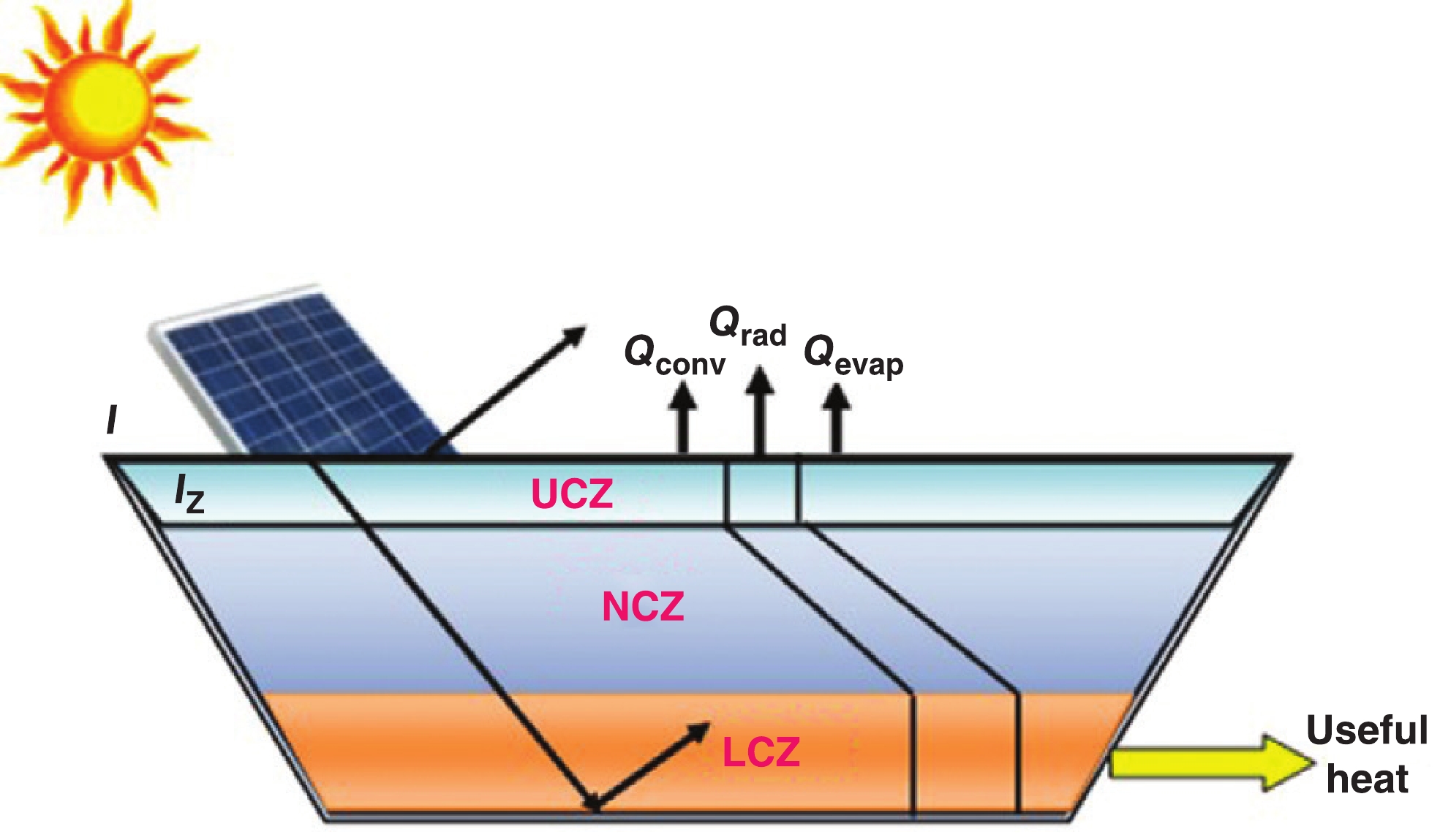
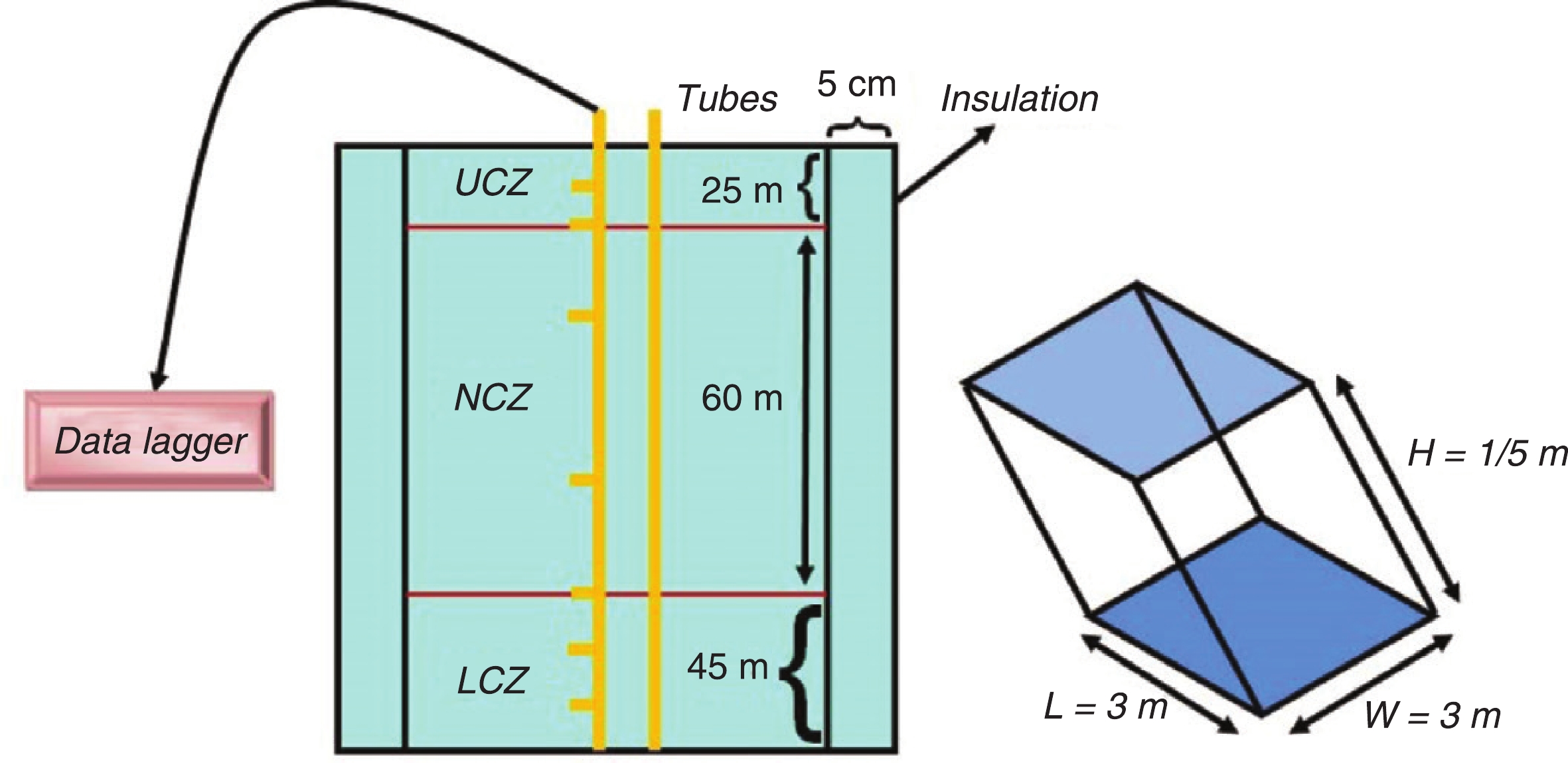
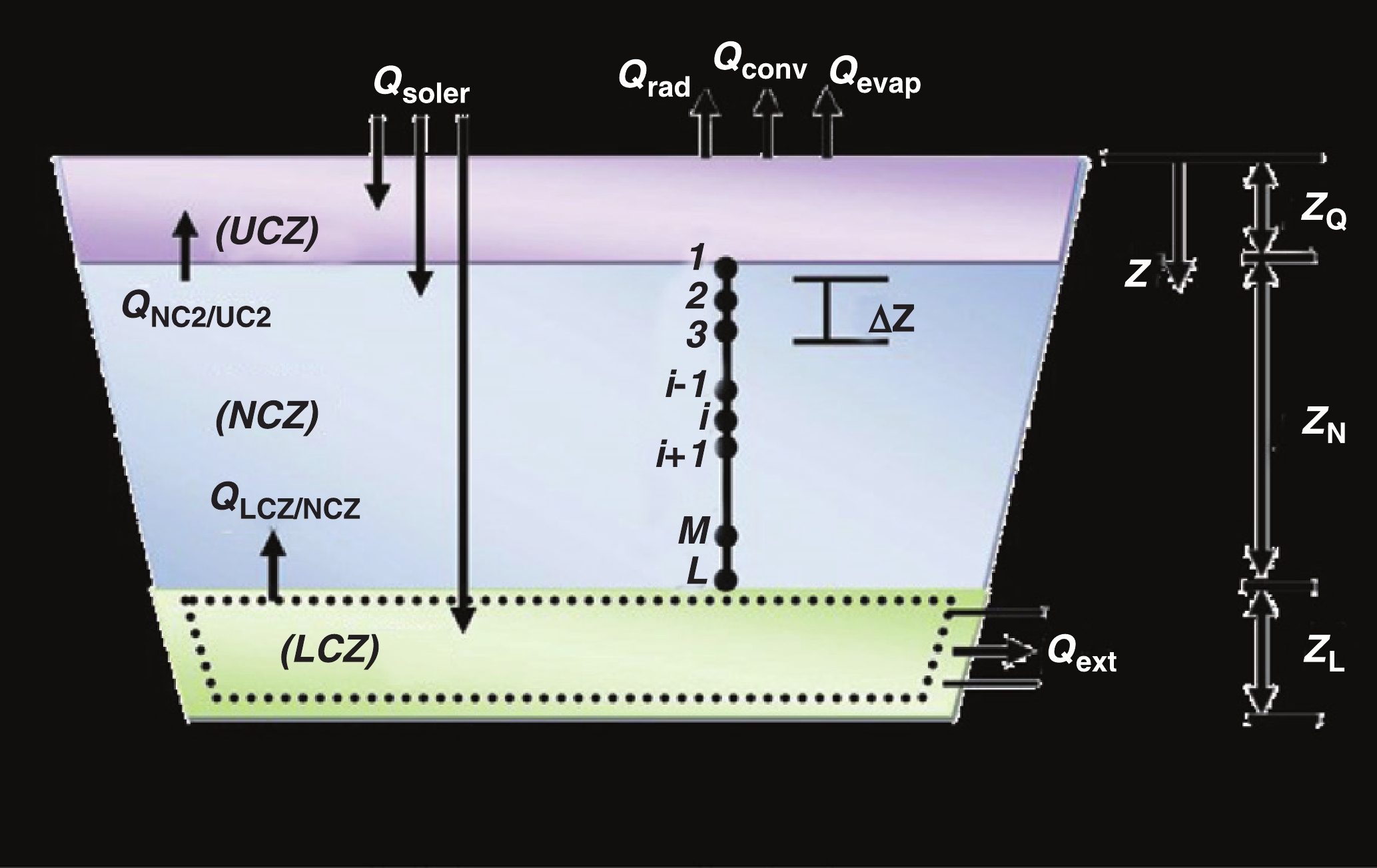
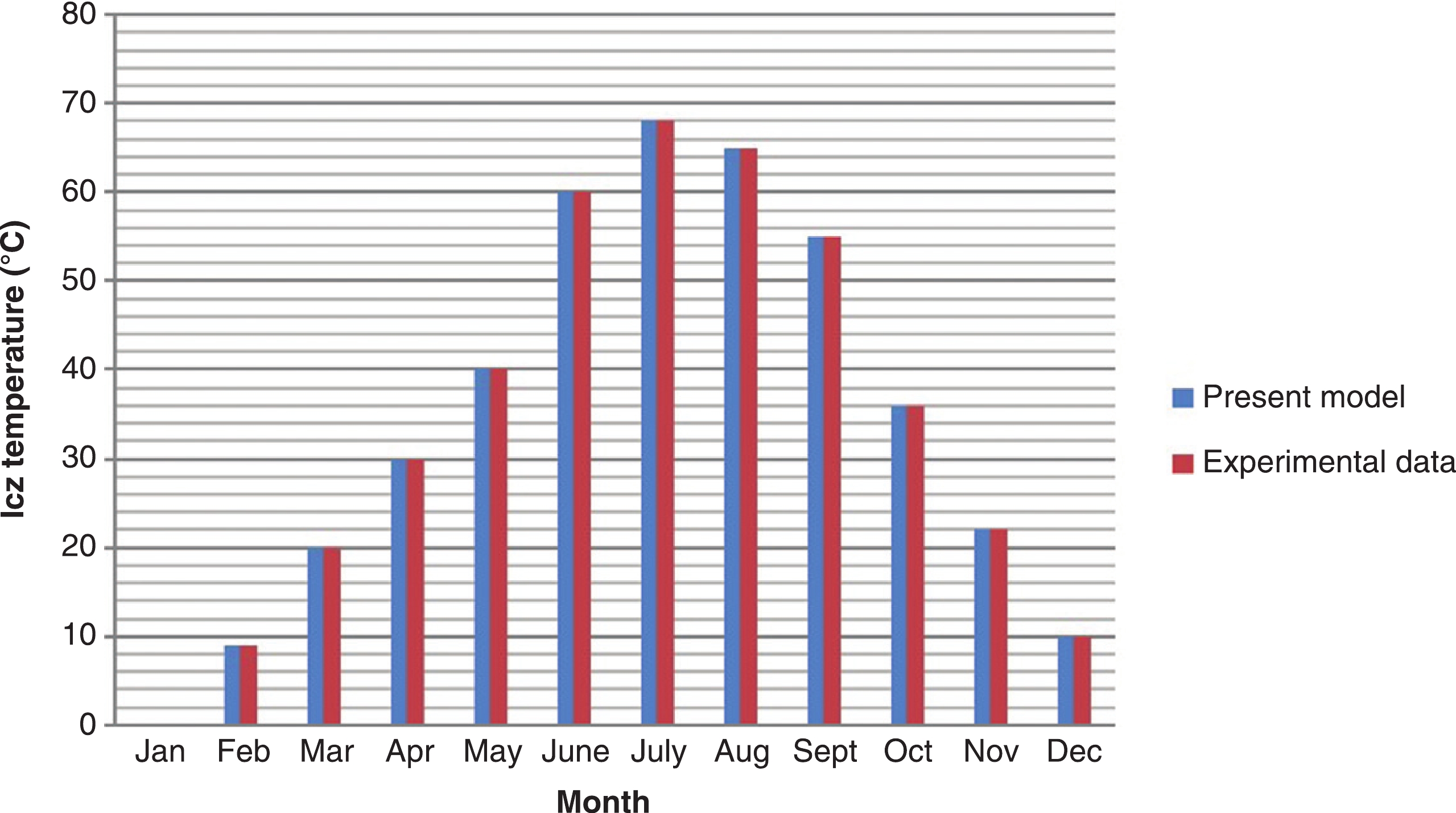
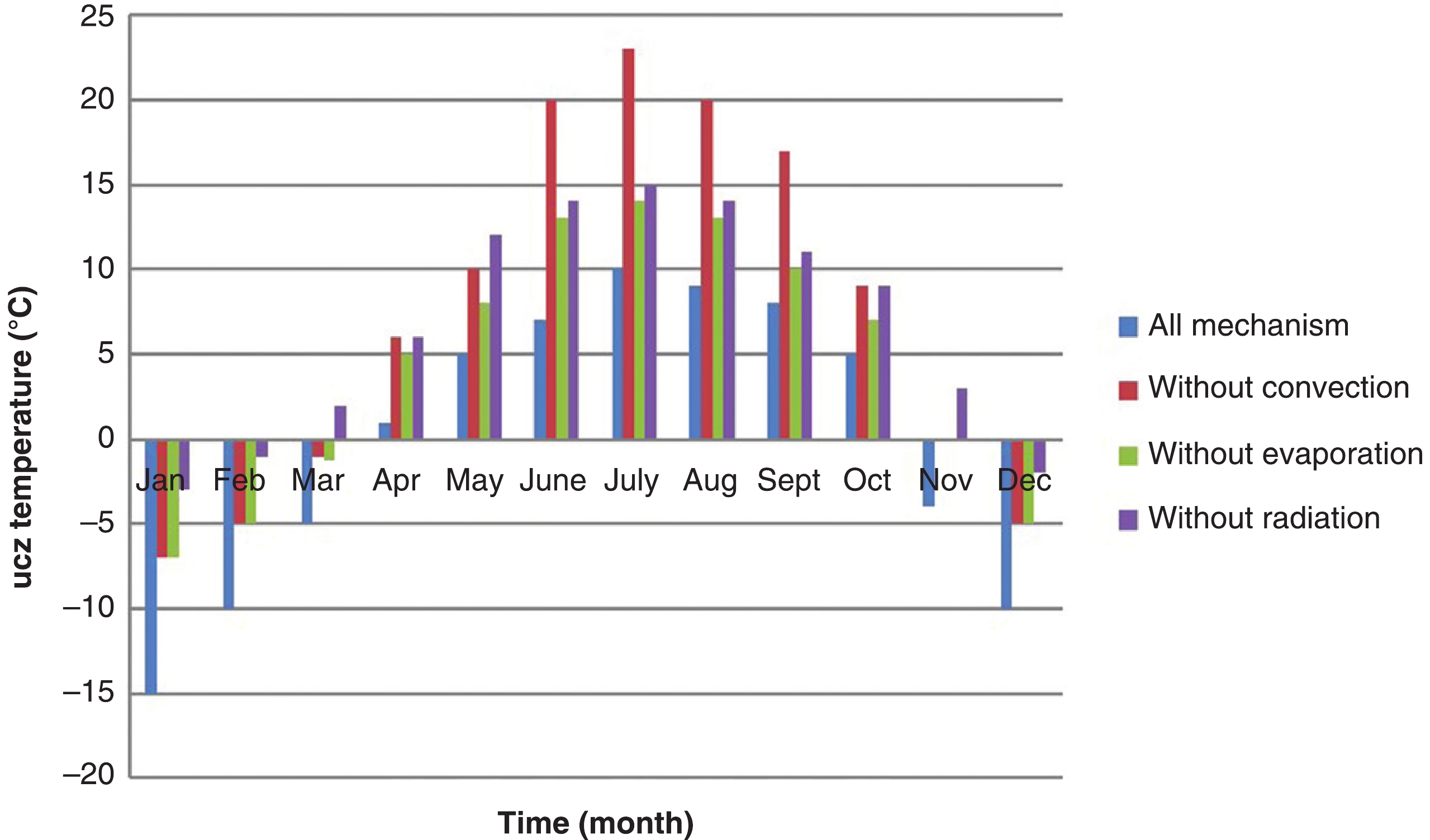
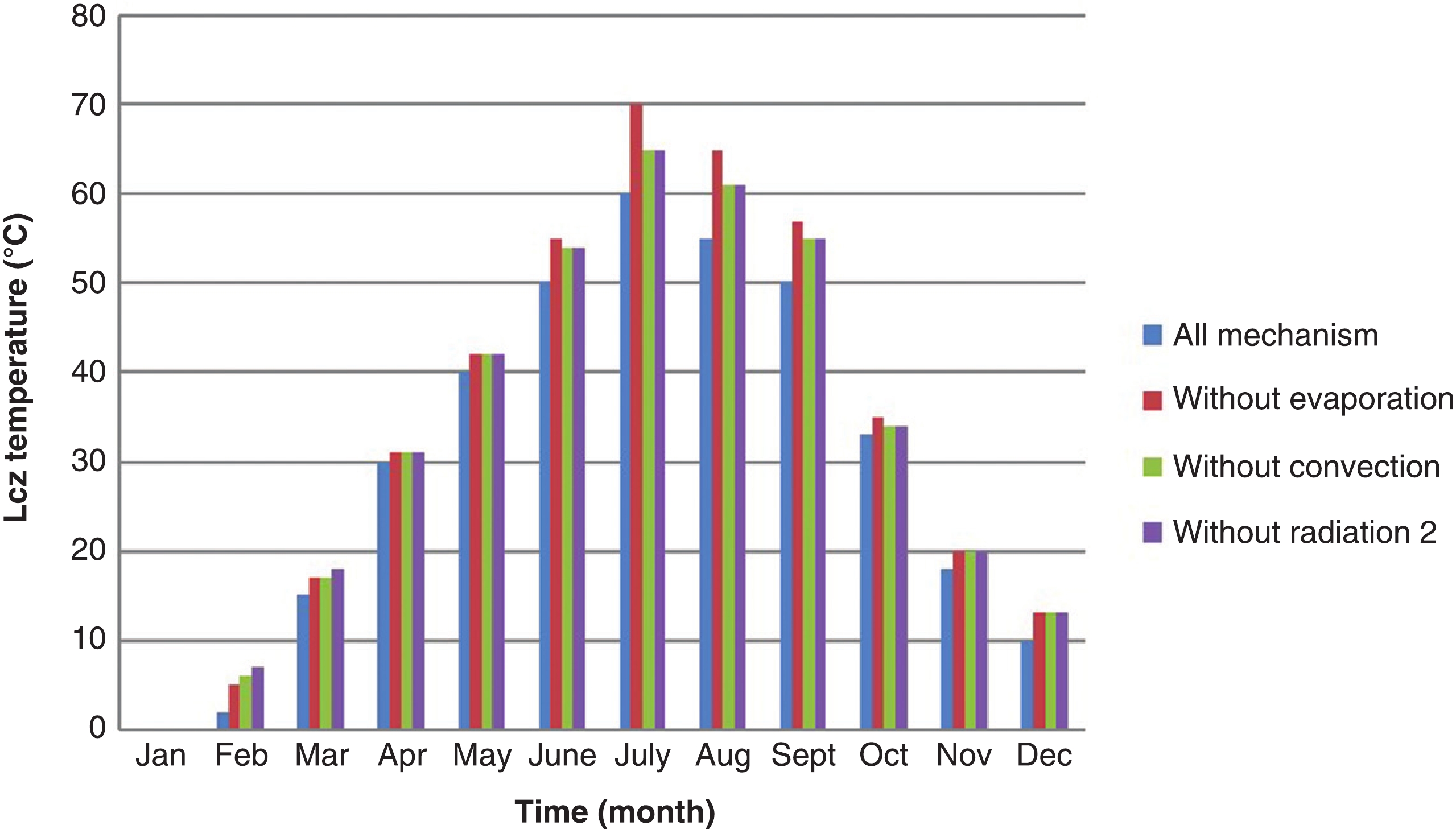
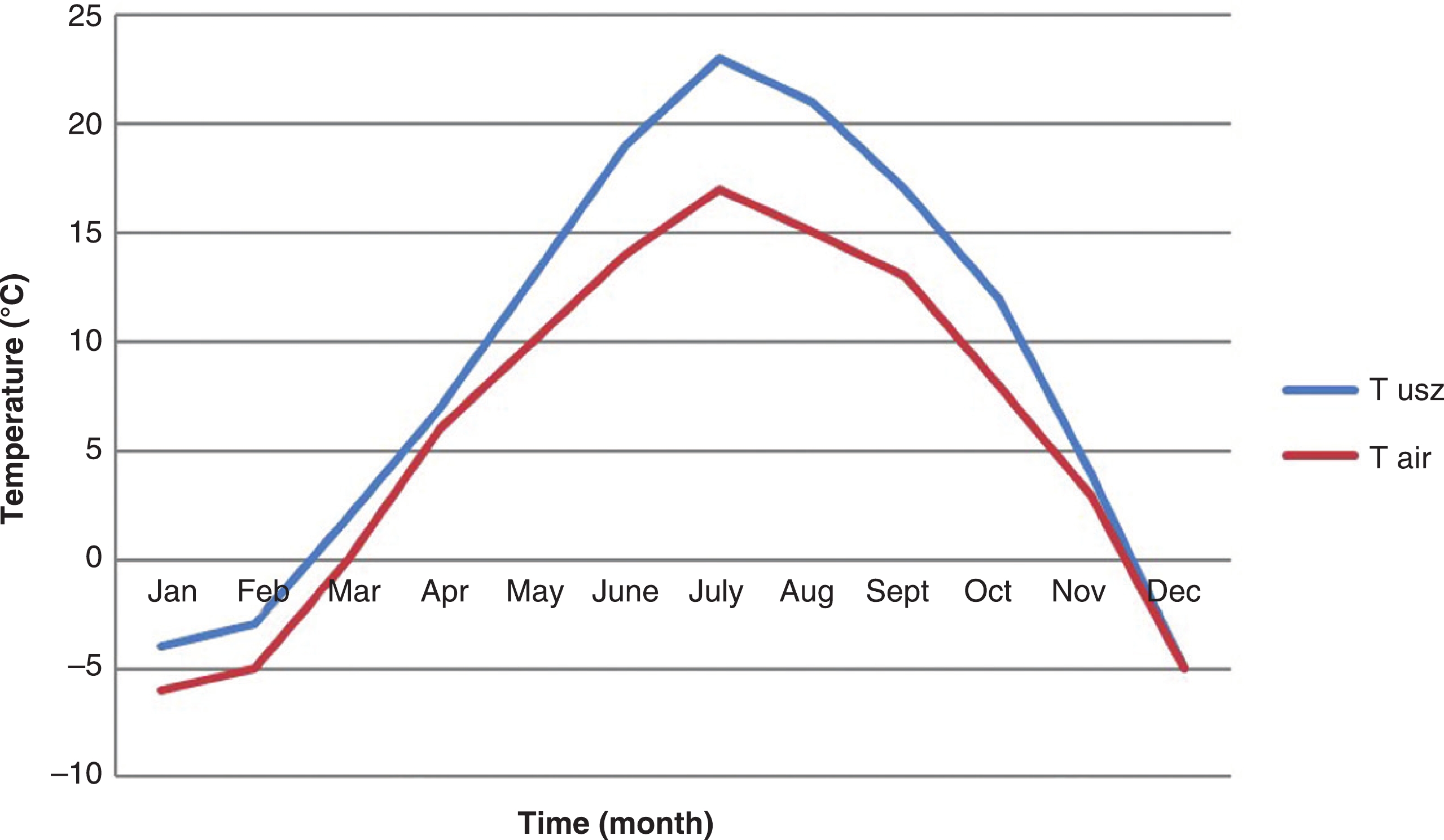
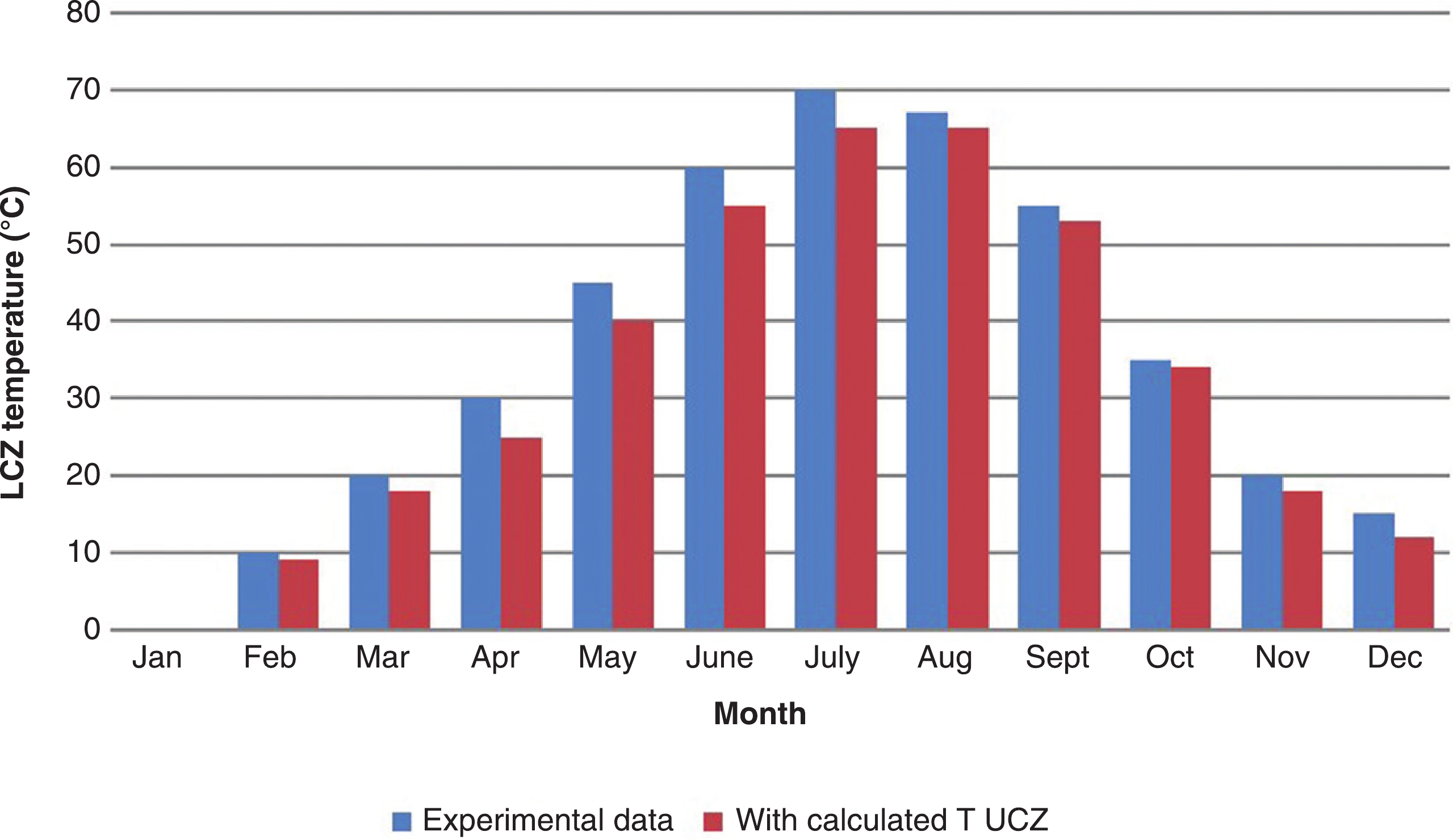
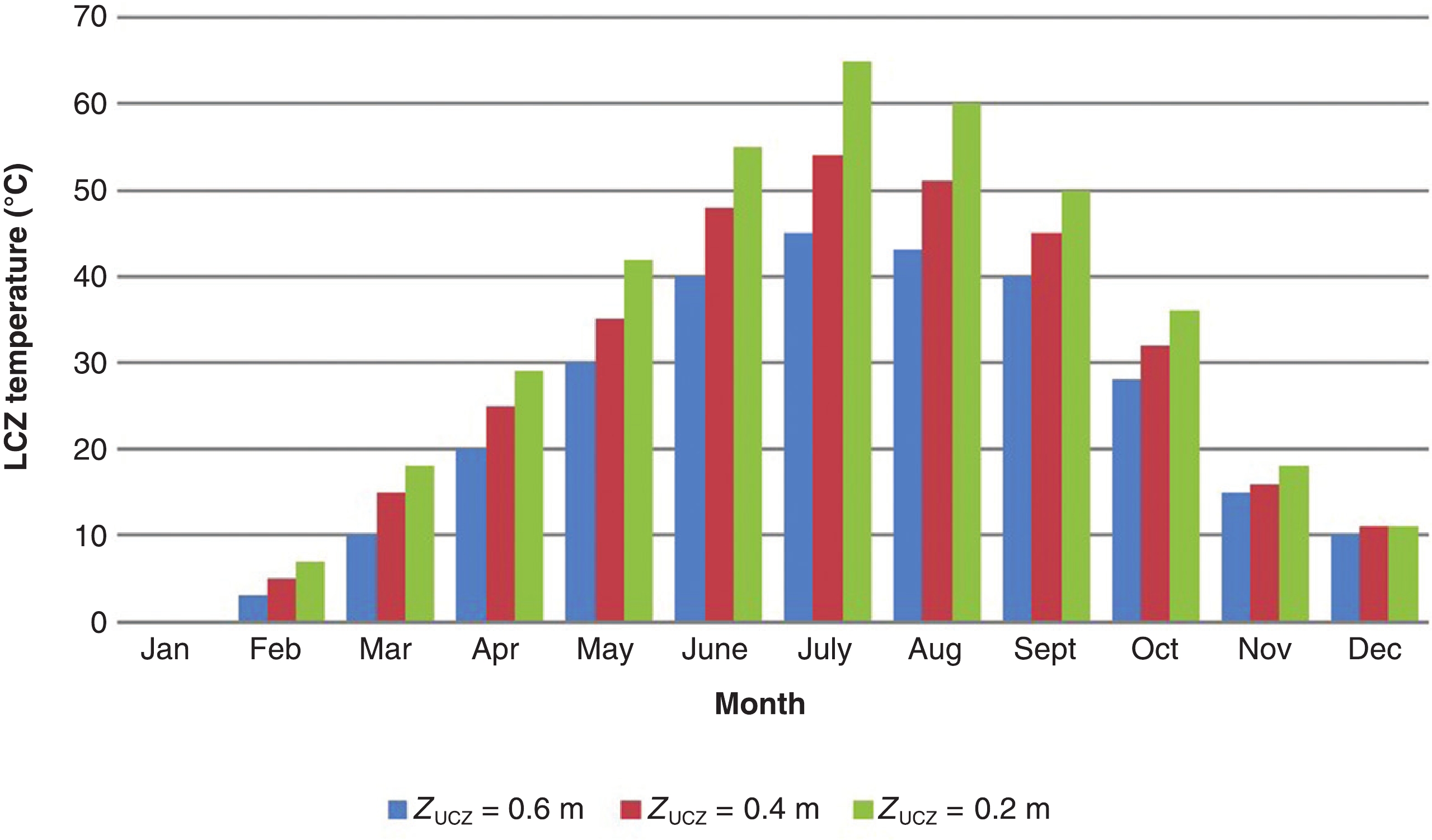
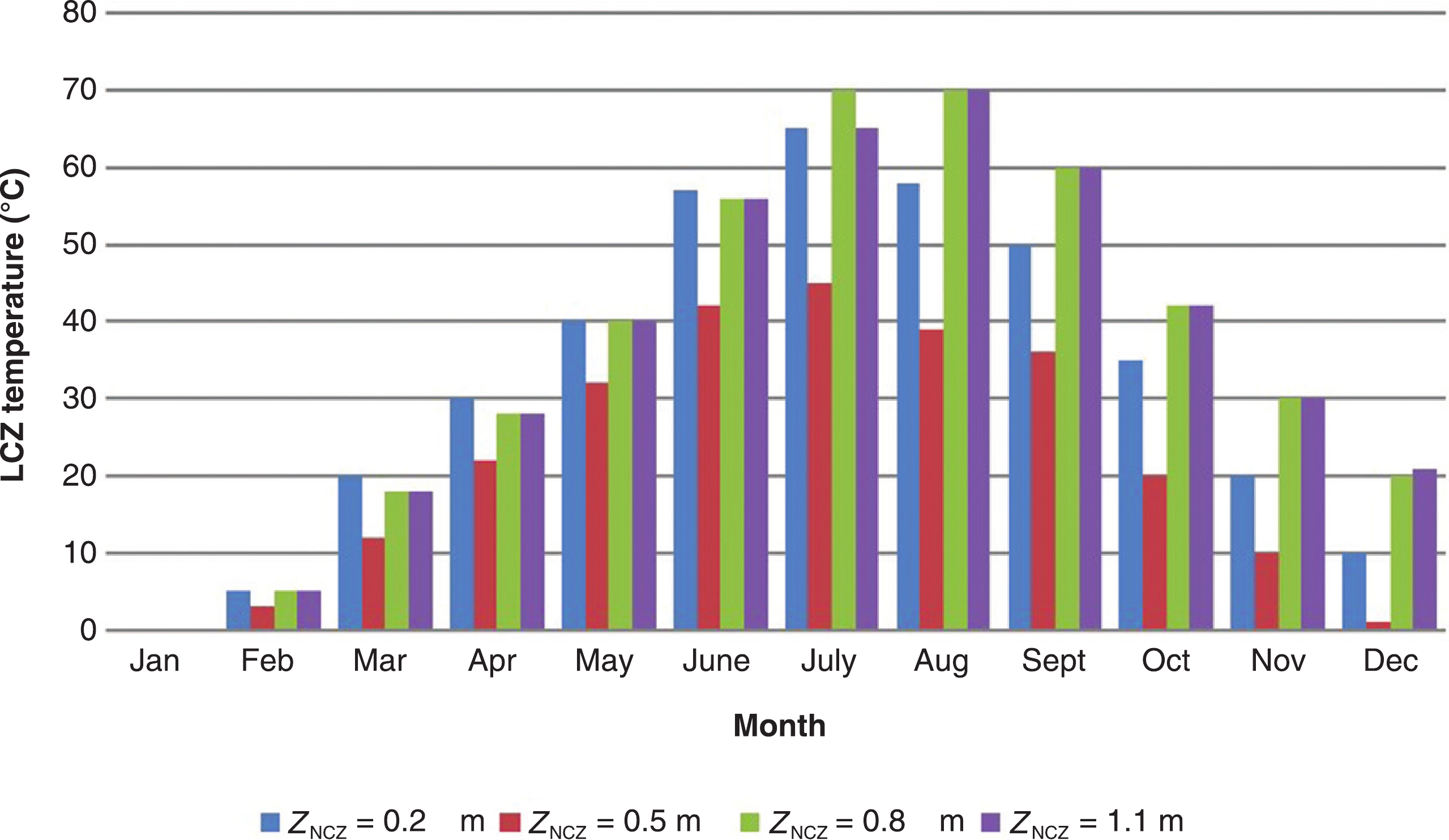
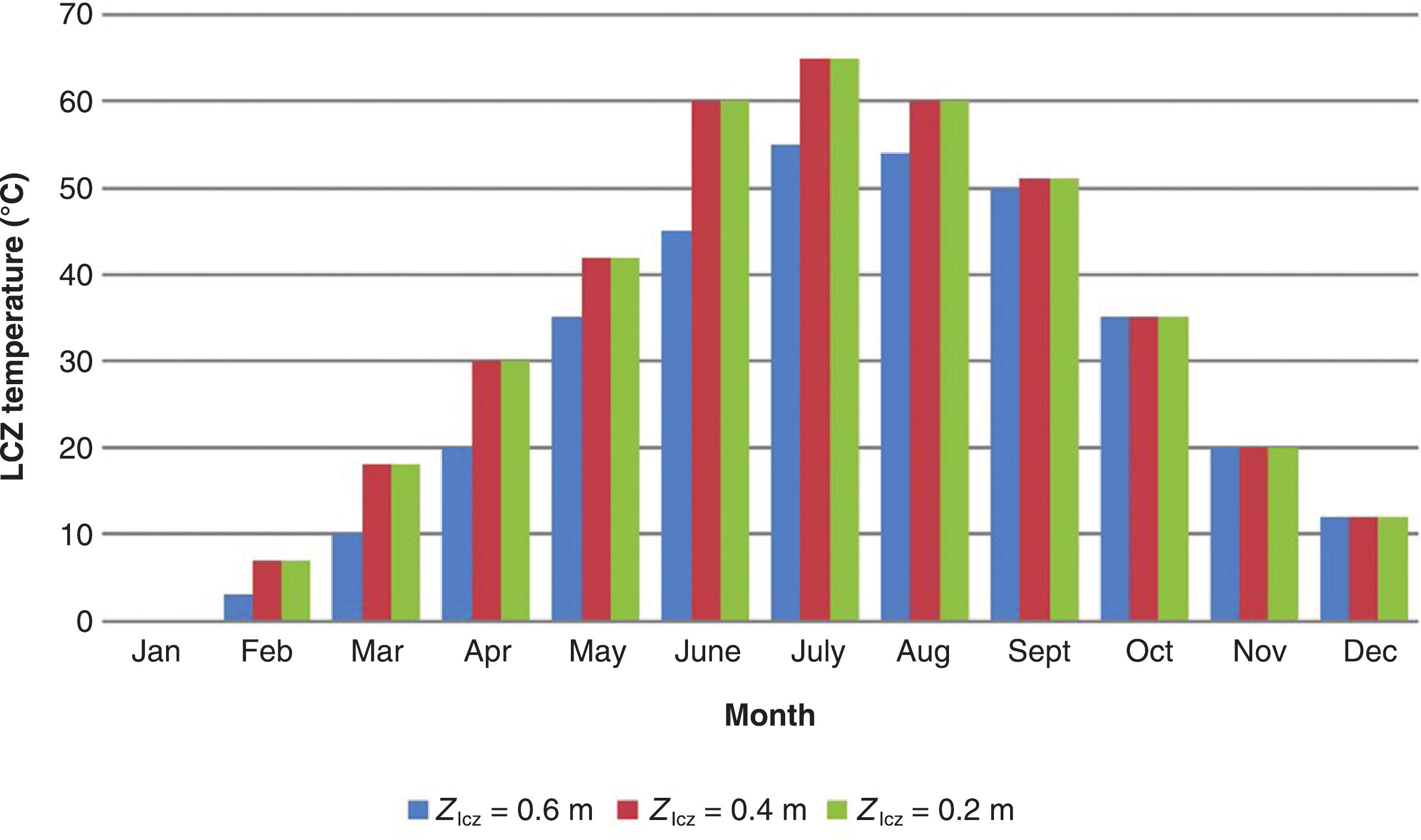
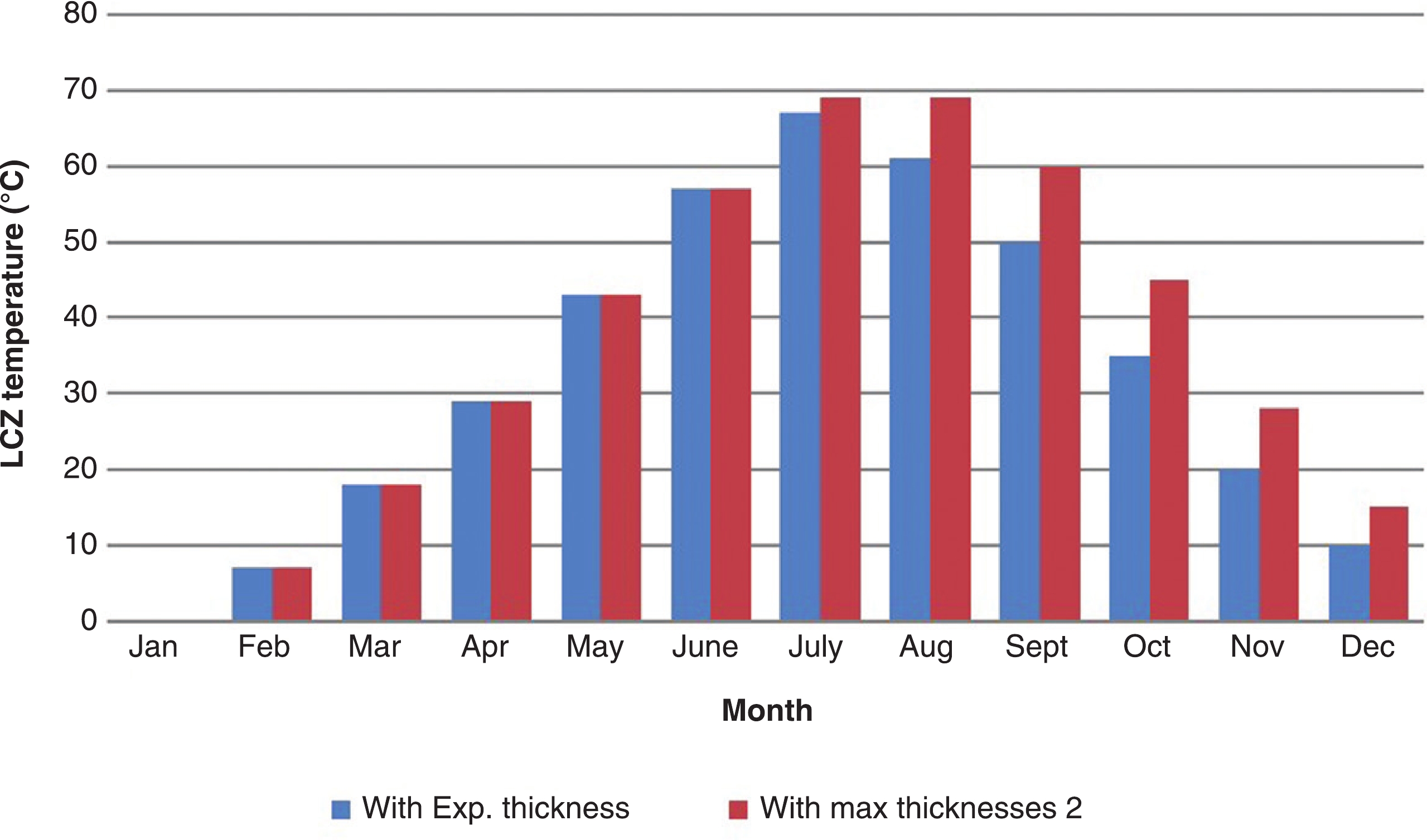
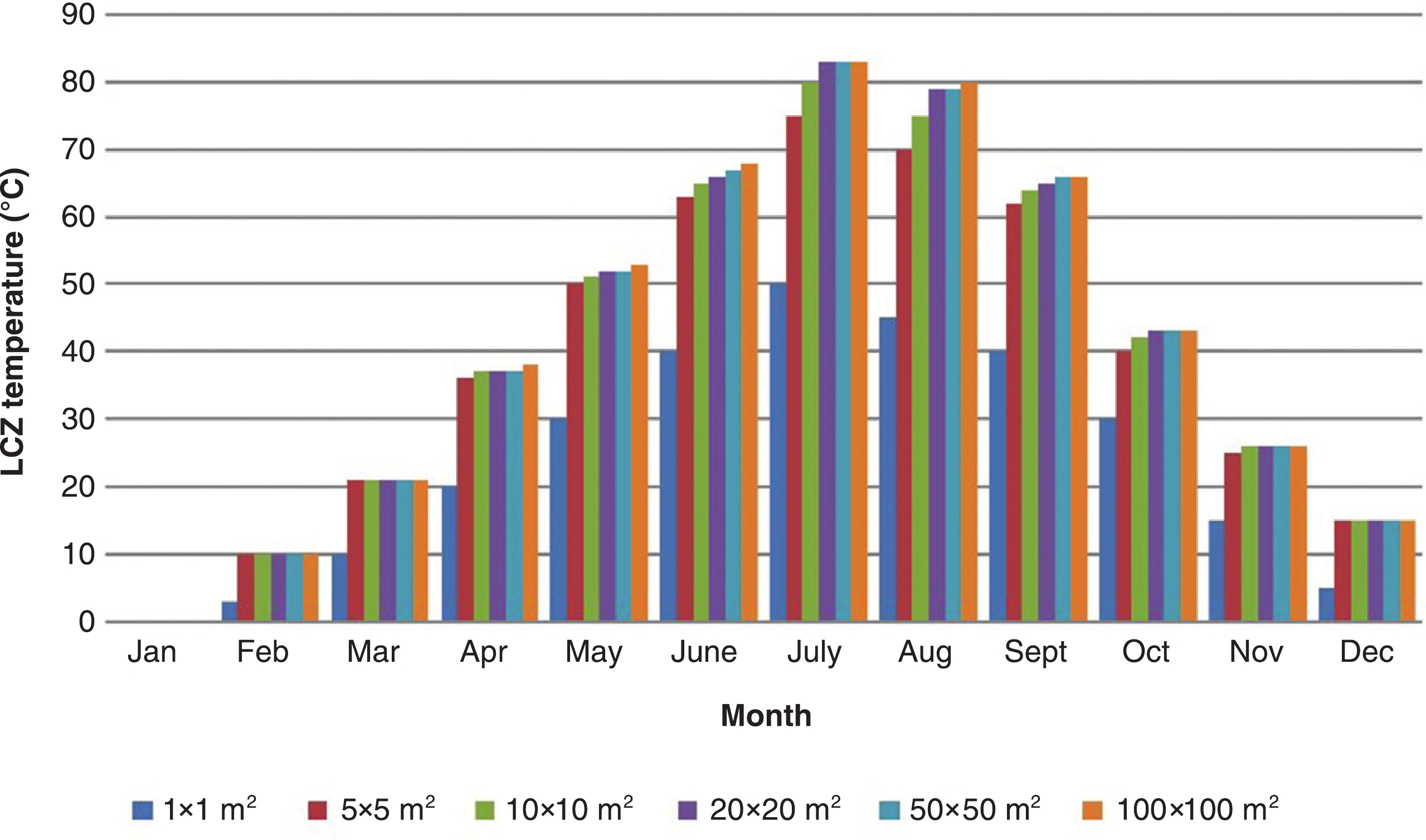
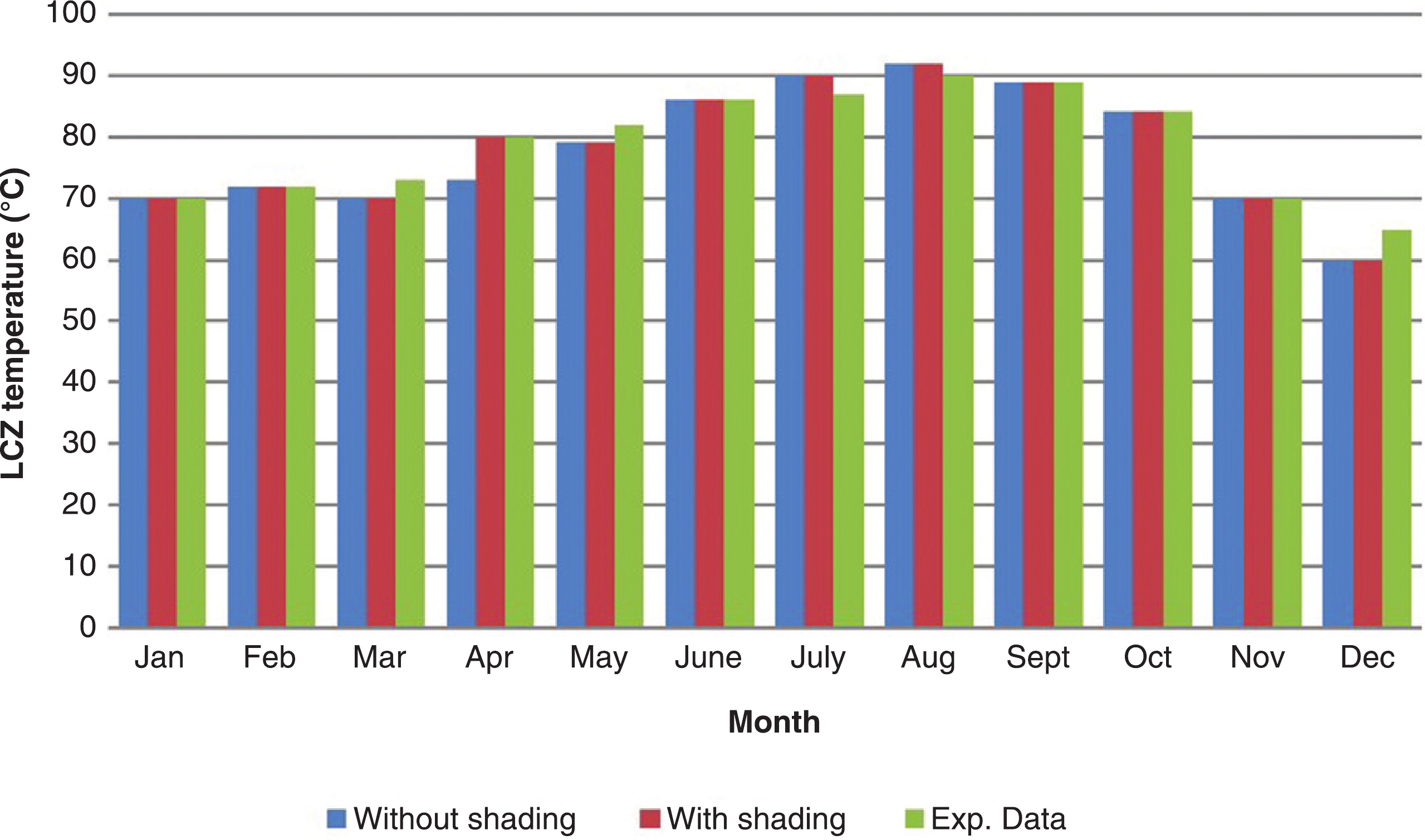
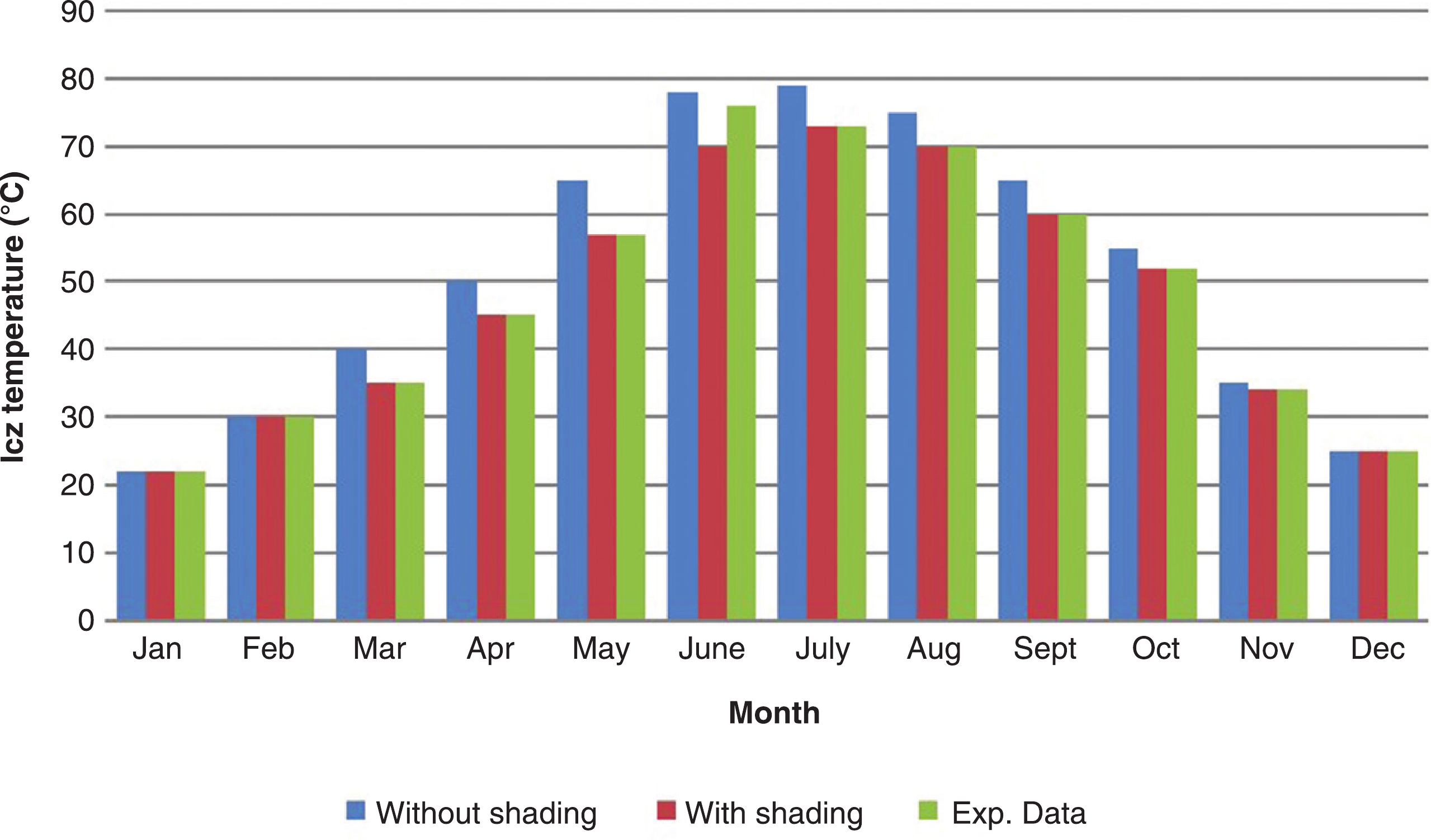
鉴于太阳能无处不在,太阳能应用广受世人欢迎。太阳能技术种类繁多,其中太阳能制热应用最为普遍,故本文欲研究太阳池利用太阳能供热的方方面面。为此,本文对太阳池的热传递特性进行了数值模拟,并验证了模拟结果。本文分析有无阴影的两种情形下太阳能系统所面临的物理现实。其中一大重要发现是随着太阳池表面的增加,太阳池液体所吸收的热量越来越多,但阴影影响却越来越低。
鉴于太阳能无处不在,太阳能应用广受世人欢迎。太阳能技术种类繁多,其中太阳能制热应用最为普遍,故本文欲研究太阳池利用太阳能供热的方方面面。为此,本文对太阳池的热传递特性进行了数值模拟,并验证了模拟结果。本文分析有无阴影的两种情形下太阳能系统所面临的物理现实。其中一大重要发现是随着太阳池表面的增加,太阳池液体所吸收的热量越来越多,但阴影影响却越来越低。

2022, 6(5): 758-768.
doi: 10.1093/ce/zkac045
摘要:
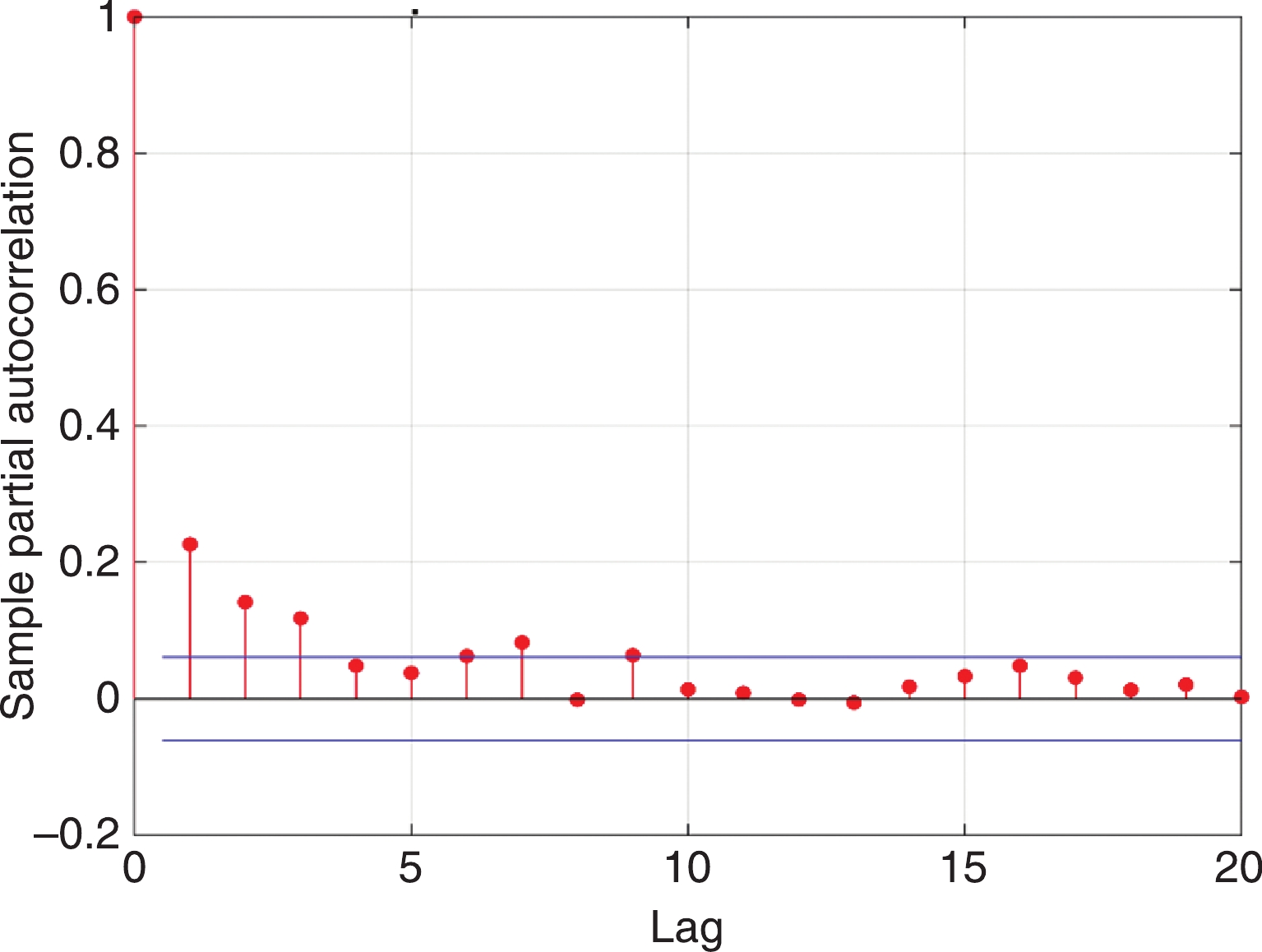
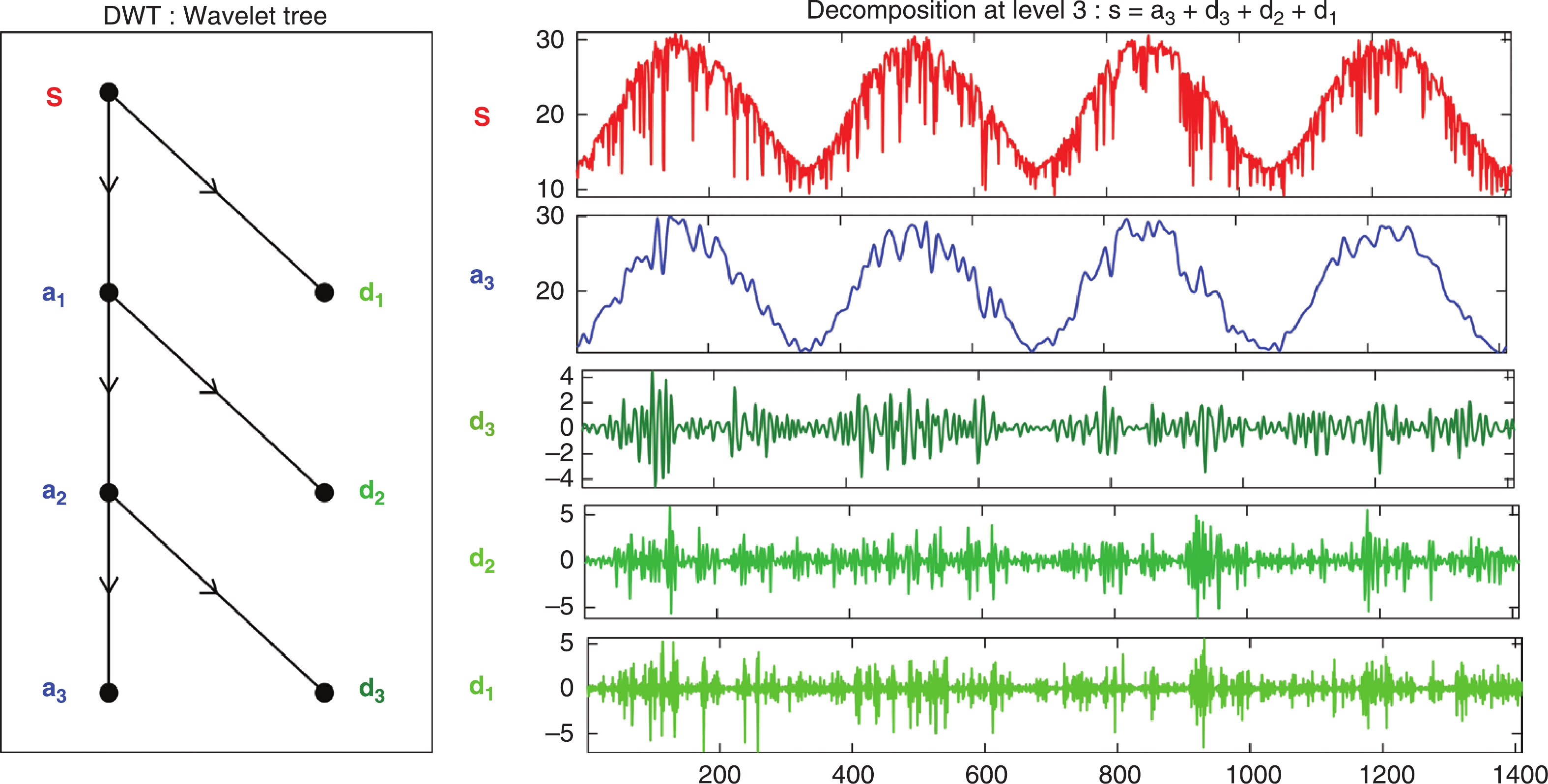
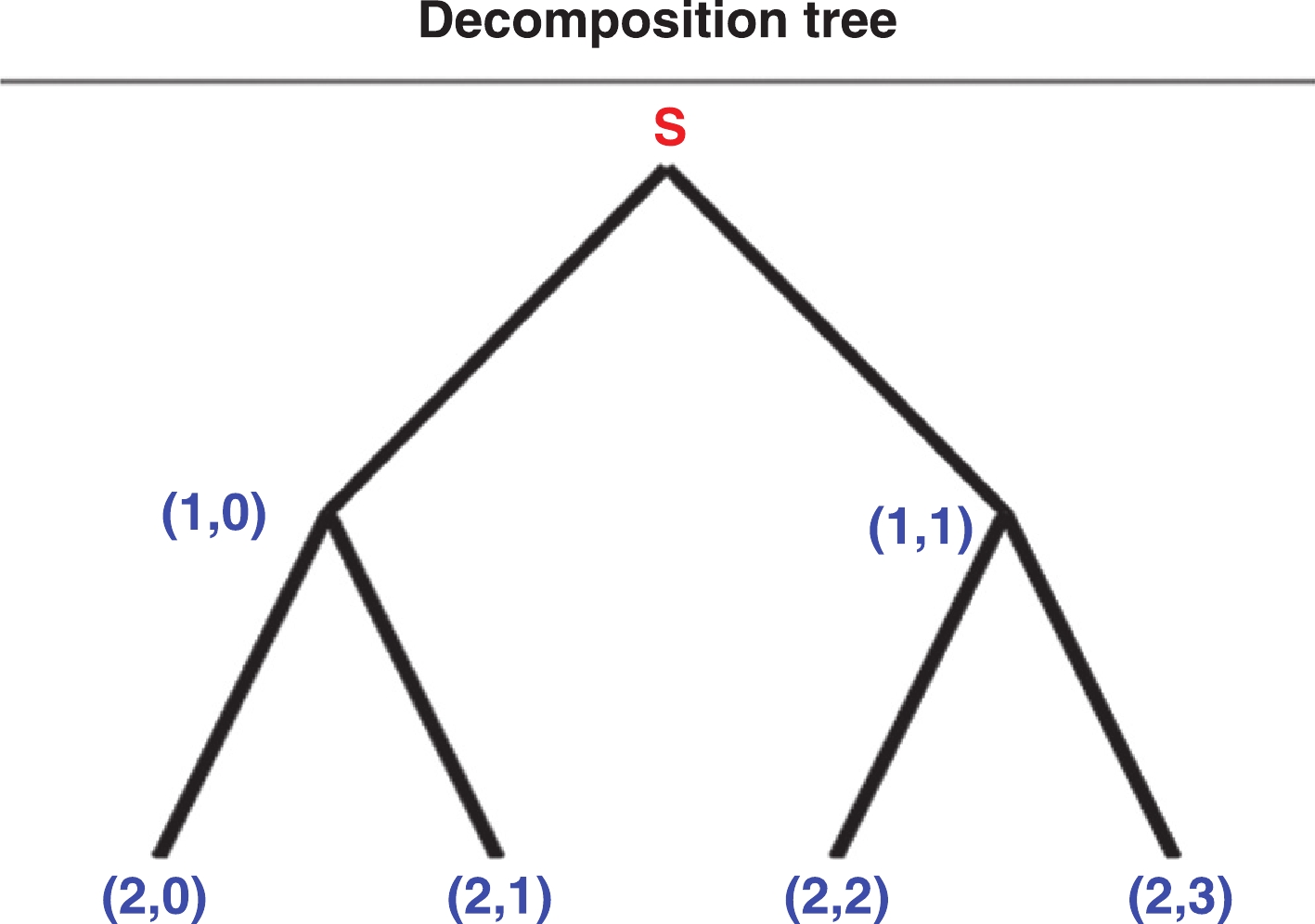
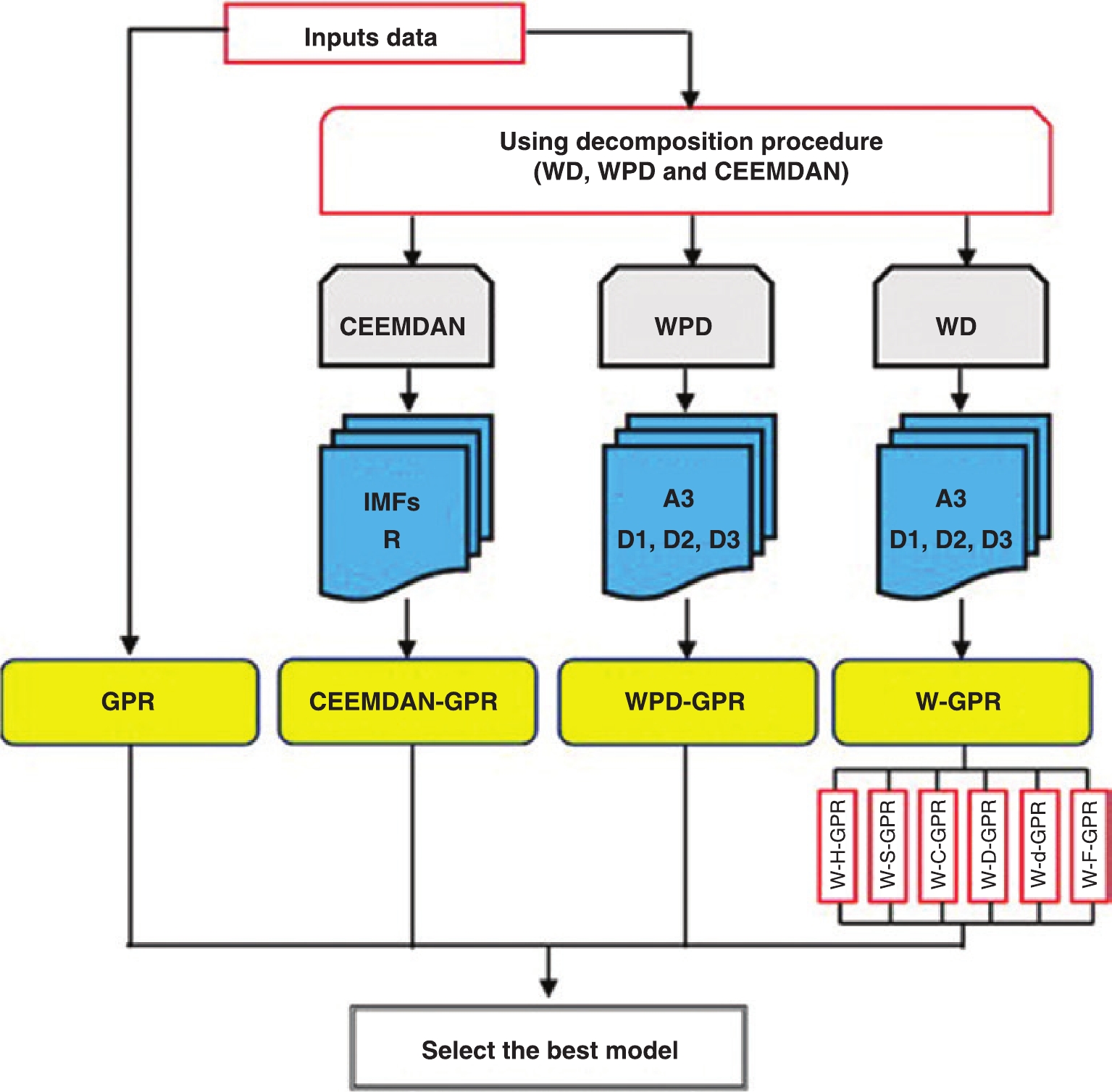
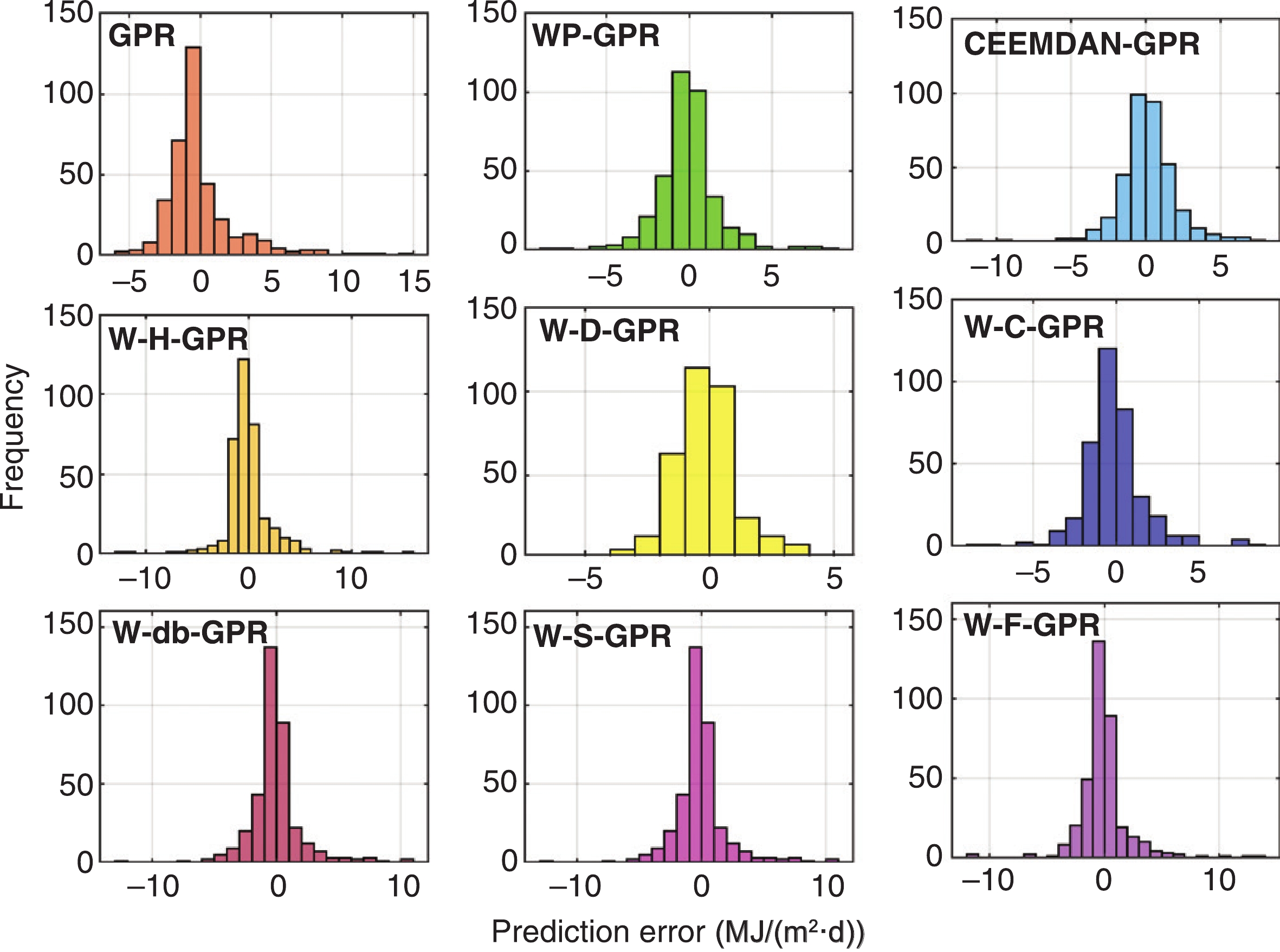
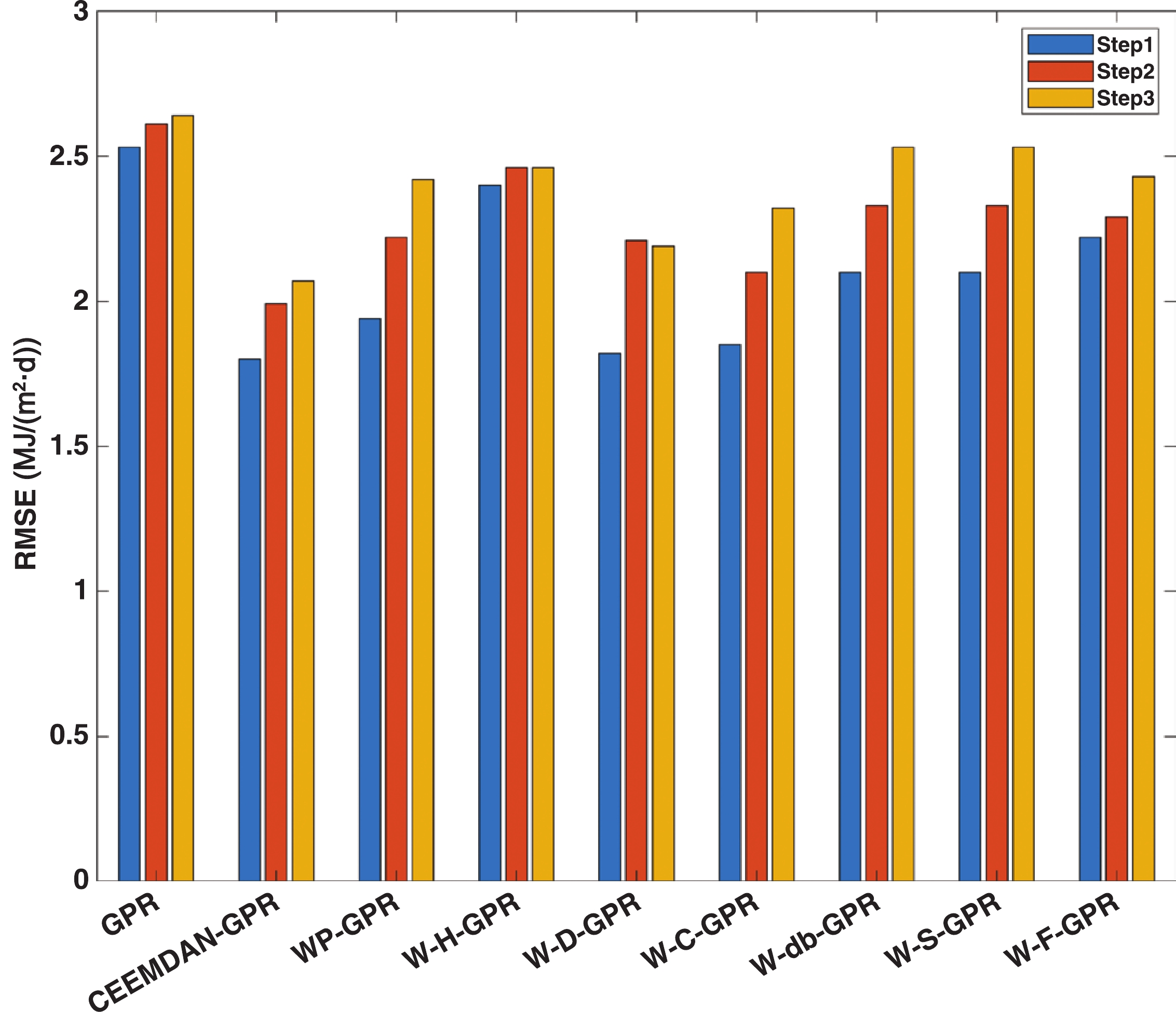
欲确保能源电力系统持续稳定地发挥效用,则应准确测定太阳辐照度。另外,鉴于能源电力系统组件的不稳定行为及随机性,太阳辐照度评估极具挑战性。本文提出了一种日太阳辐照度预测用新型混合预测模型,即自适应噪声完备集合经验模态分解——Gaussian过程回归(CEEMDAN-GPR)。CEEMDAN将非平稳总太阳辐照转换为正则子集。而后将此类正则子集用作GPR模型的预测输入。本文研究结果表明提议混合模型的性能在均方误差、均方根误差、决定系数及相对均方根误差等方面优于另外两种常用太阳辐照度预测混合模型,即小波——GPR及小波包——GPR,其均方误差、均方根误差、决定系数及相对均方根误差分别达到3.23 MJ/(m2·d)、1.80 MJ/(m2·d)、95.56%、8.80% (一步超前预测)。提议混合模型可确保电力系统的安全可靠运行。
欲确保能源电力系统持续稳定地发挥效用,则应准确测定太阳辐照度。另外,鉴于能源电力系统组件的不稳定行为及随机性,太阳辐照度评估极具挑战性。本文提出了一种日太阳辐照度预测用新型混合预测模型,即自适应噪声完备集合经验模态分解——Gaussian过程回归(CEEMDAN-GPR)。CEEMDAN将非平稳总太阳辐照转换为正则子集。而后将此类正则子集用作GPR模型的预测输入。本文研究结果表明提议混合模型的性能在均方误差、均方根误差、决定系数及相对均方根误差等方面优于另外两种常用太阳辐照度预测混合模型,即小波——GPR及小波包——GPR,其均方误差、均方根误差、决定系数及相对均方根误差分别达到3.23 MJ/(m2·d)、1.80 MJ/(m2·d)、95.56%、8.80% (一步超前预测)。提议混合模型可确保电力系统的安全可靠运行。






2022, 6(5): 769-779.
doi: 10.1093/ce/zkac048
摘要:
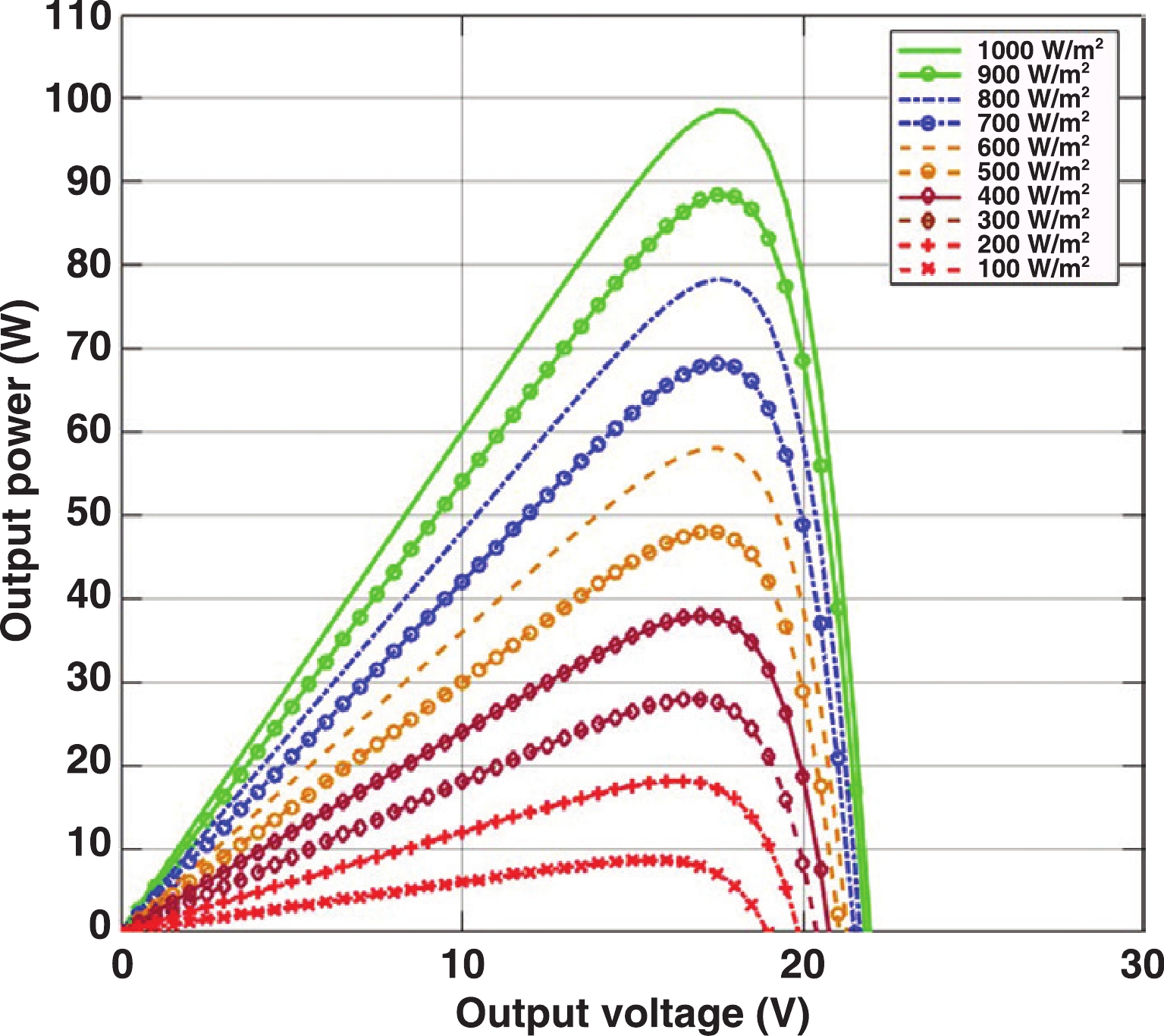
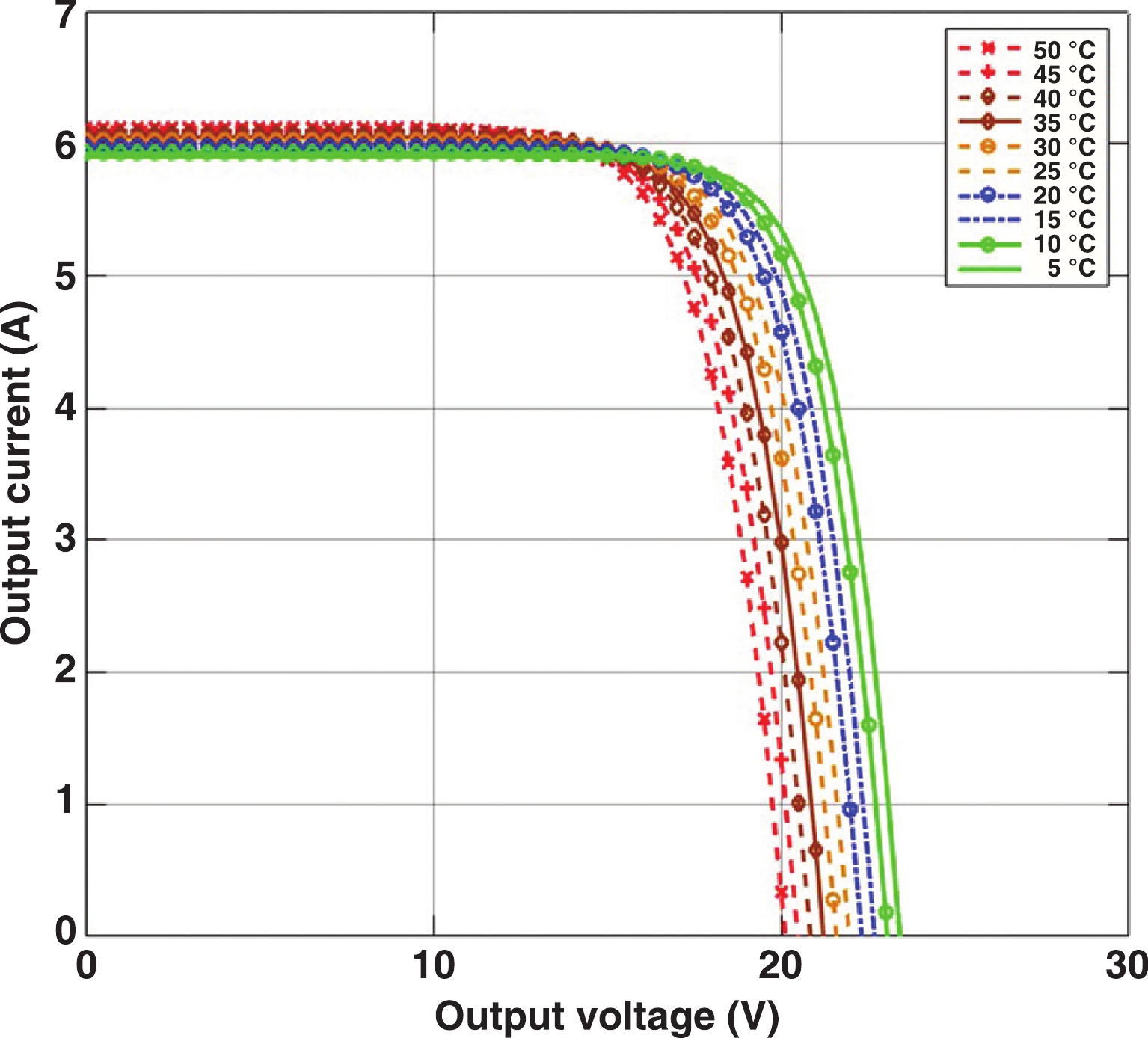
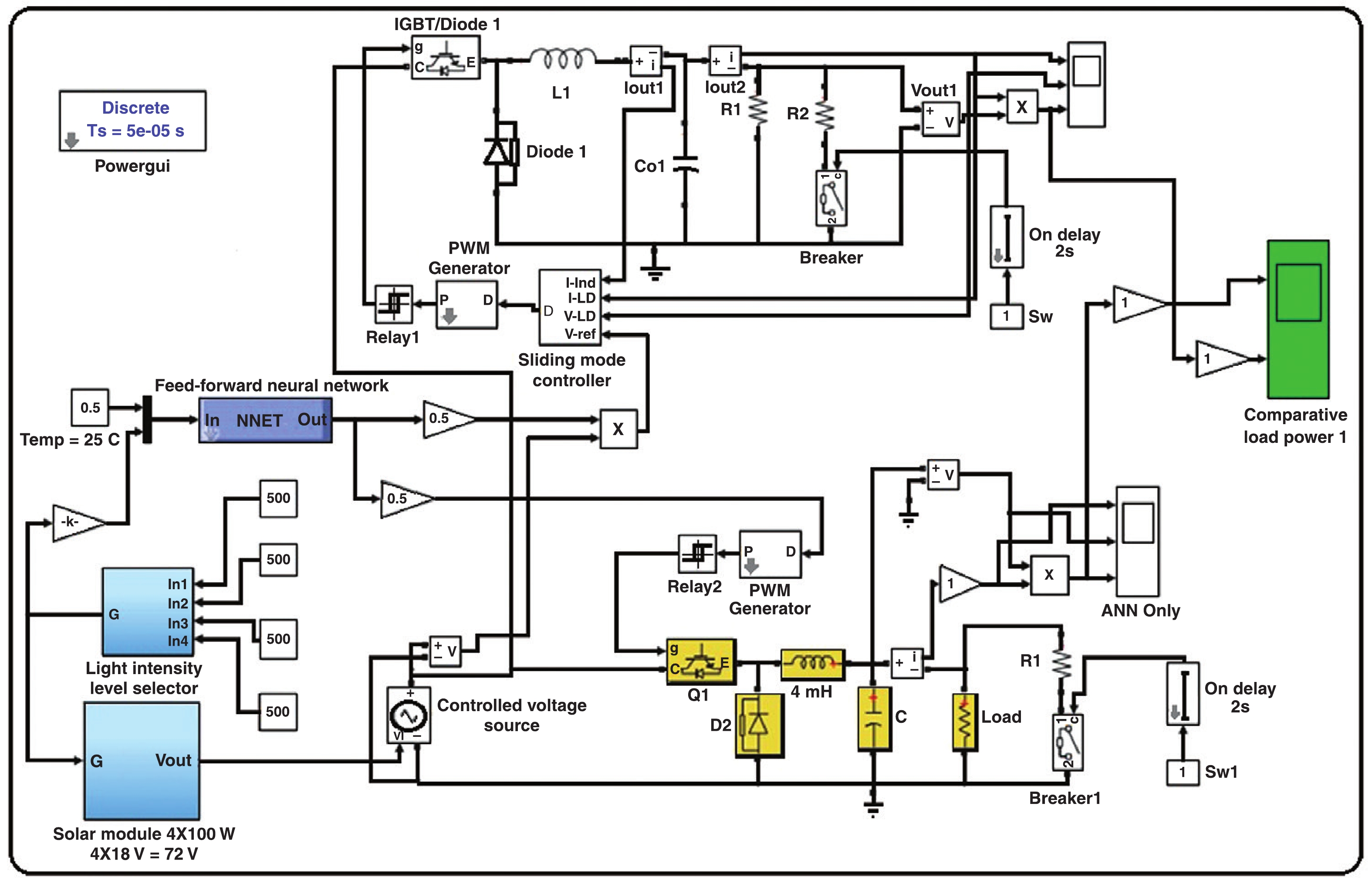
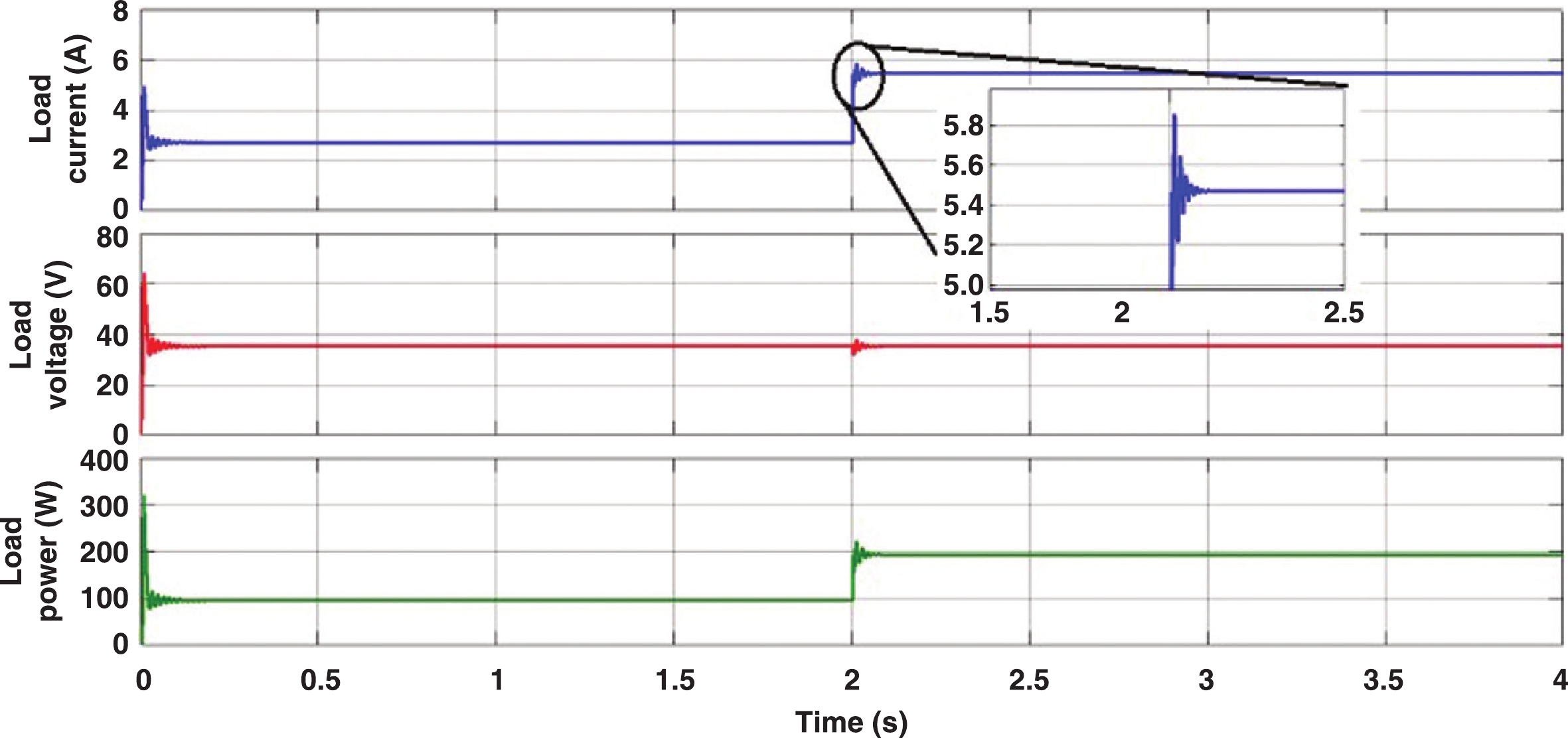
本文详细描述了旨在提高光伏发电系统太阳能收集效率的高效控制系统的设计步骤。本文讨论了鲁棒滑模(SM)控制器支持的智能最大功率点跟踪器(MPPT),设计了跟踪MPP使用控制方案,该方案通过消除装接负载变化时的负载电流过冲来确保系统的平稳响应。该系统适用于DC-DC降压型转换器。本文首先构建了以连续电流模式运行的降压型转换器模型,又以所提出的神经网络(NN)算法计算得出跟踪系统的操作电压,再以MATLAB®/Simulink®平台仿真了含SM控制器的智能MPPT,并分析了仿真结果,研究确定了所用四个PV模块串联系统的满意度,评估了500 W/m2光强度及25 ℃环境温度下的系统性能。本文仅用提议NN算法即保证了13 Ω电阻负载下100 W的MPP跟踪响应及6.5 Ω电阻负载下200 W的MPP跟踪响应,同时实现了99.77%的系统效率。然而,当负载由50%变为100%时,该系统出现了一个约0.5 A的电流峰值。所用SM控制器表现了鲁棒的平稳响应,可消除现有电流尖峰。
本文详细描述了旨在提高光伏发电系统太阳能收集效率的高效控制系统的设计步骤。本文讨论了鲁棒滑模(SM)控制器支持的智能最大功率点跟踪器(MPPT),设计了跟踪MPP使用控制方案,该方案通过消除装接负载变化时的负载电流过冲来确保系统的平稳响应。该系统适用于DC-DC降压型转换器。本文首先构建了以连续电流模式运行的降压型转换器模型,又以所提出的神经网络(NN)算法计算得出跟踪系统的操作电压,再以MATLAB®/Simulink®平台仿真了含SM控制器的智能MPPT,并分析了仿真结果,研究确定了所用四个PV模块串联系统的满意度,评估了500 W/m2光强度及25 ℃环境温度下的系统性能。本文仅用提议NN算法即保证了13 Ω电阻负载下100 W的MPP跟踪响应及6.5 Ω电阻负载下200 W的MPP跟踪响应,同时实现了99.77%的系统效率。然而,当负载由50%变为100%时,该系统出现了一个约0.5 A的电流峰值。所用SM控制器表现了鲁棒的平稳响应,可消除现有电流尖峰。





2022, 6(5): 780-793.
doi: 10.1093/ce/zkac053
摘要:
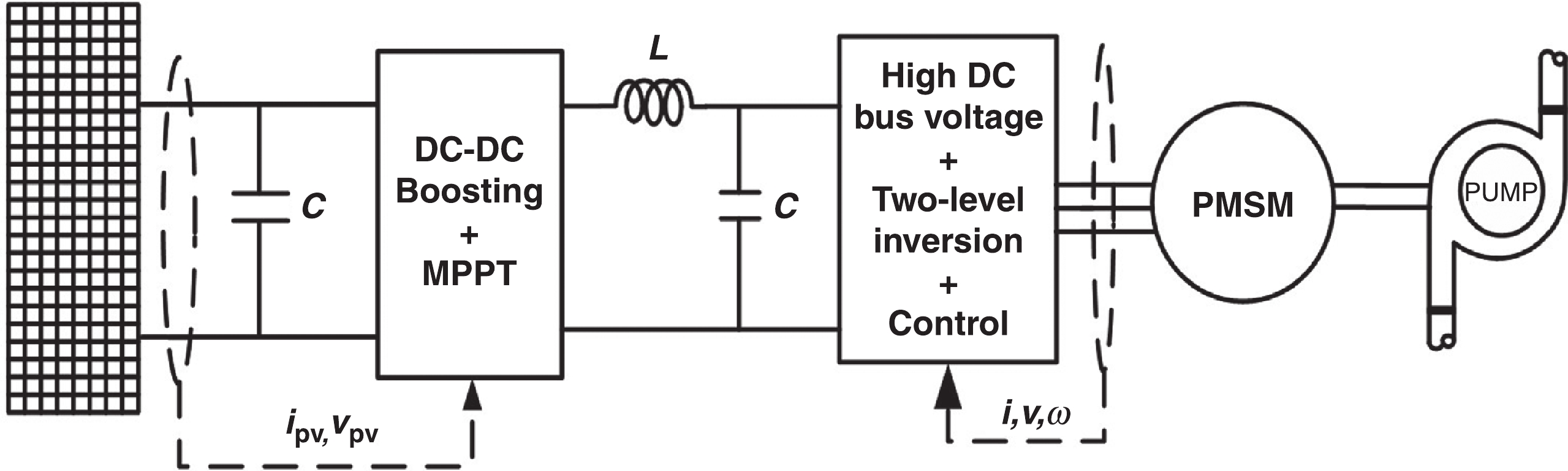
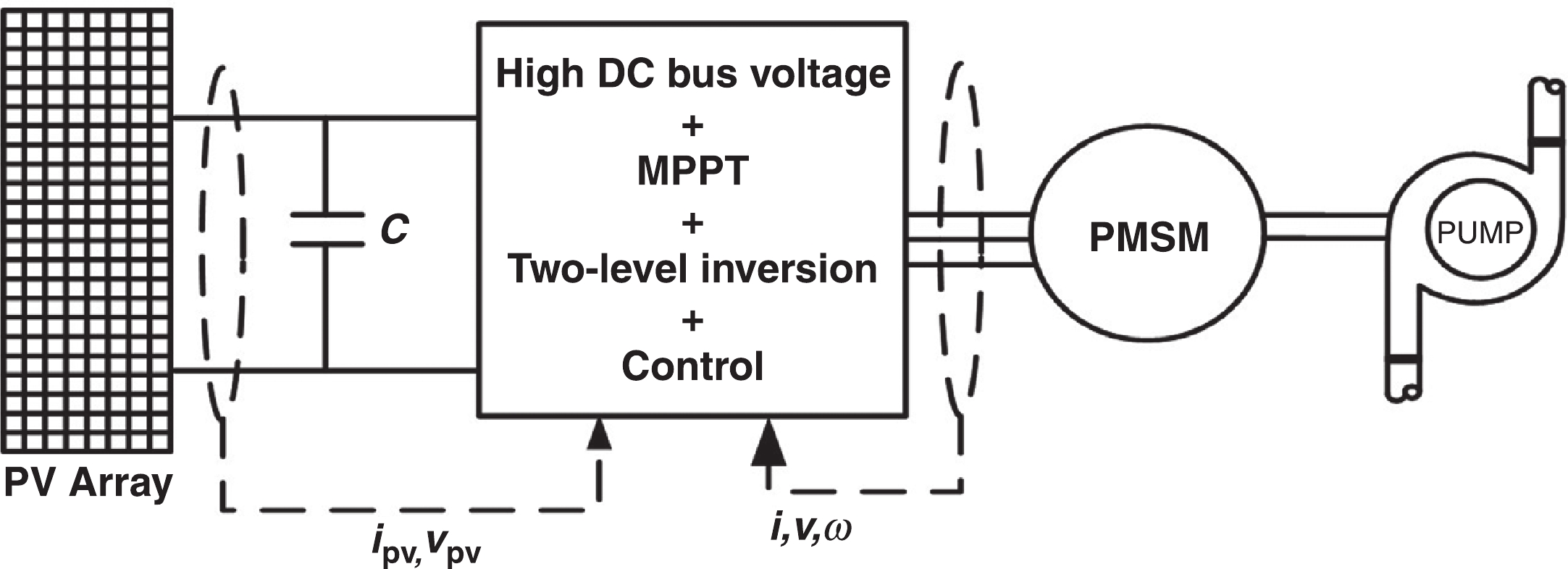
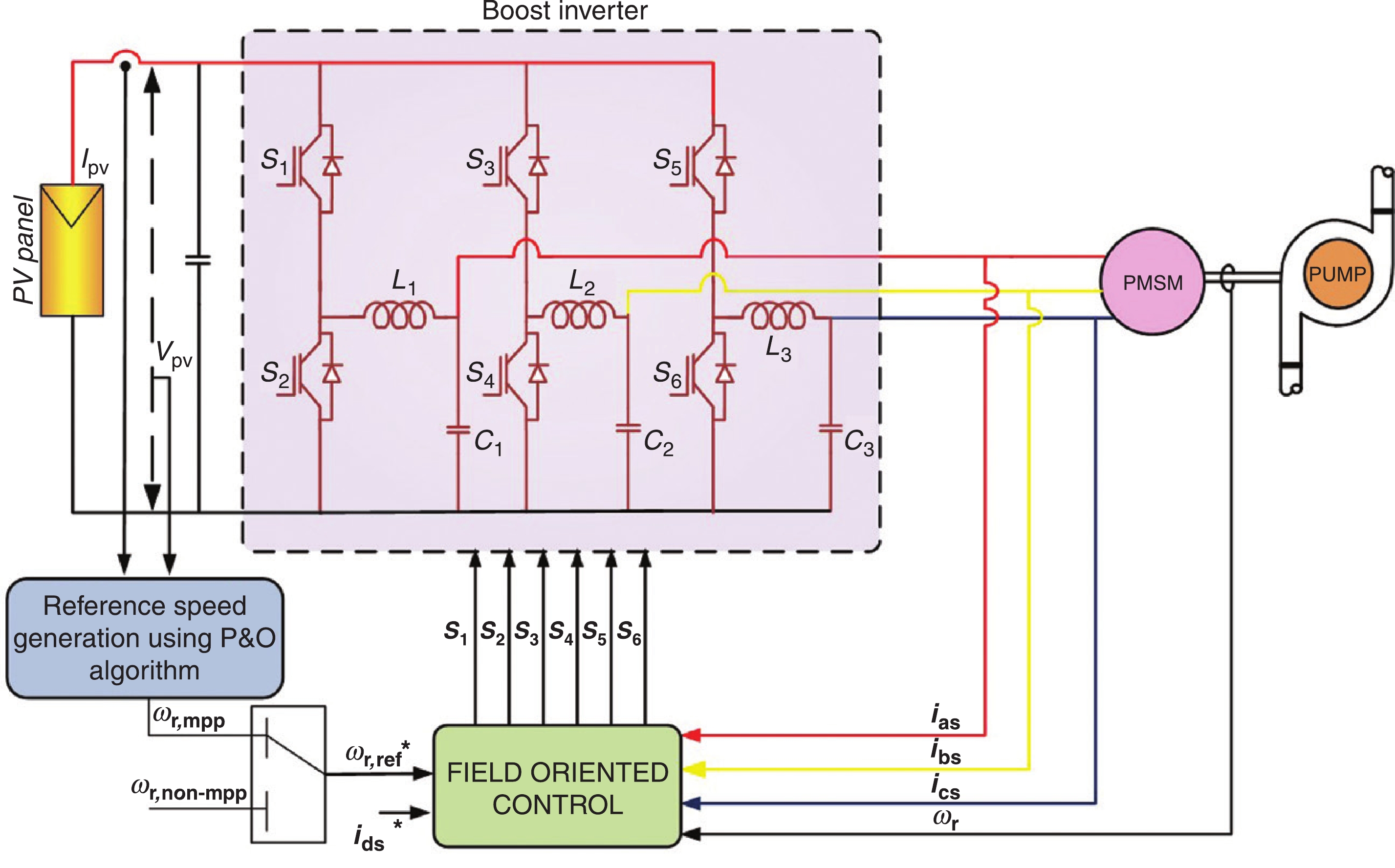
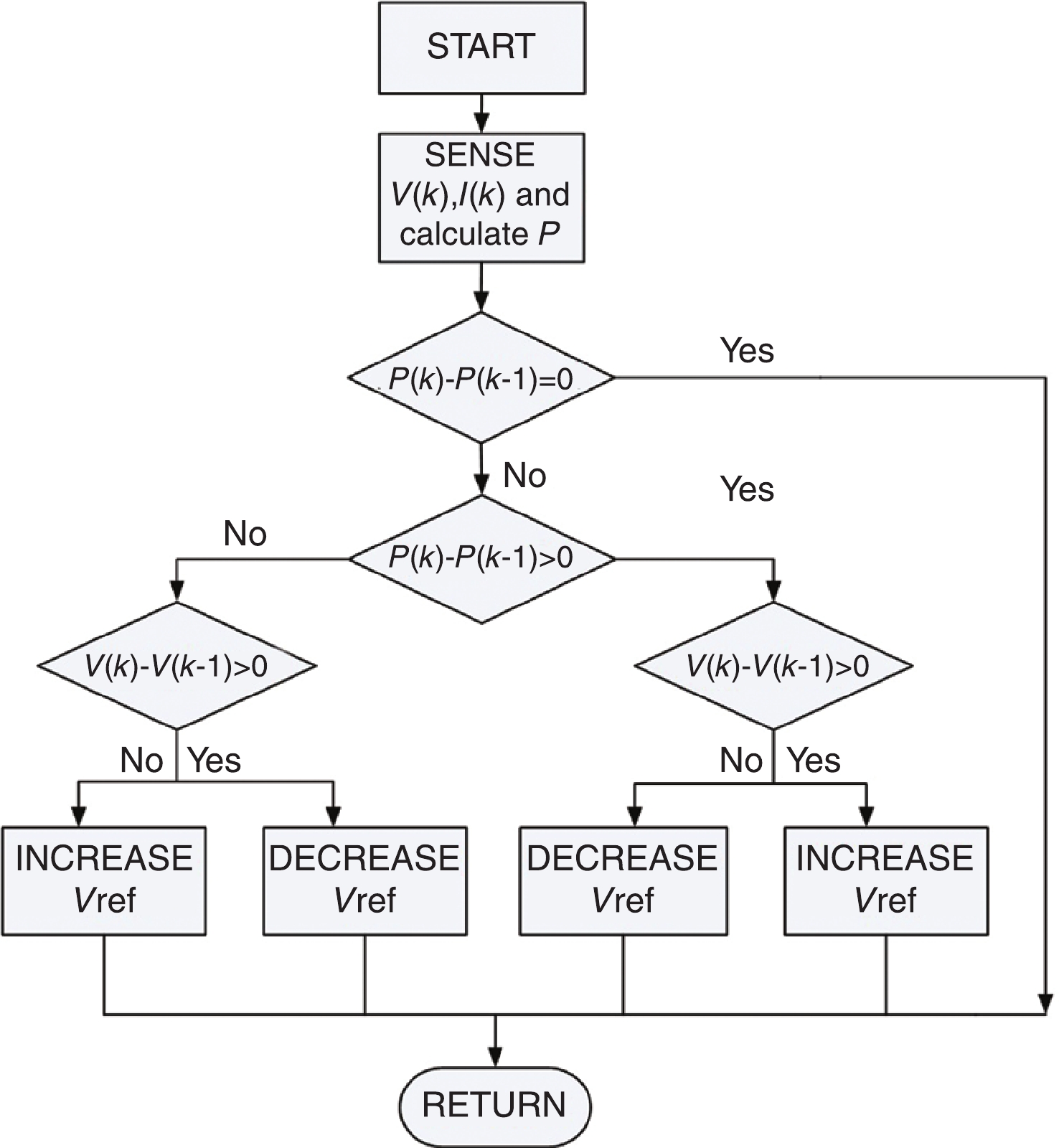
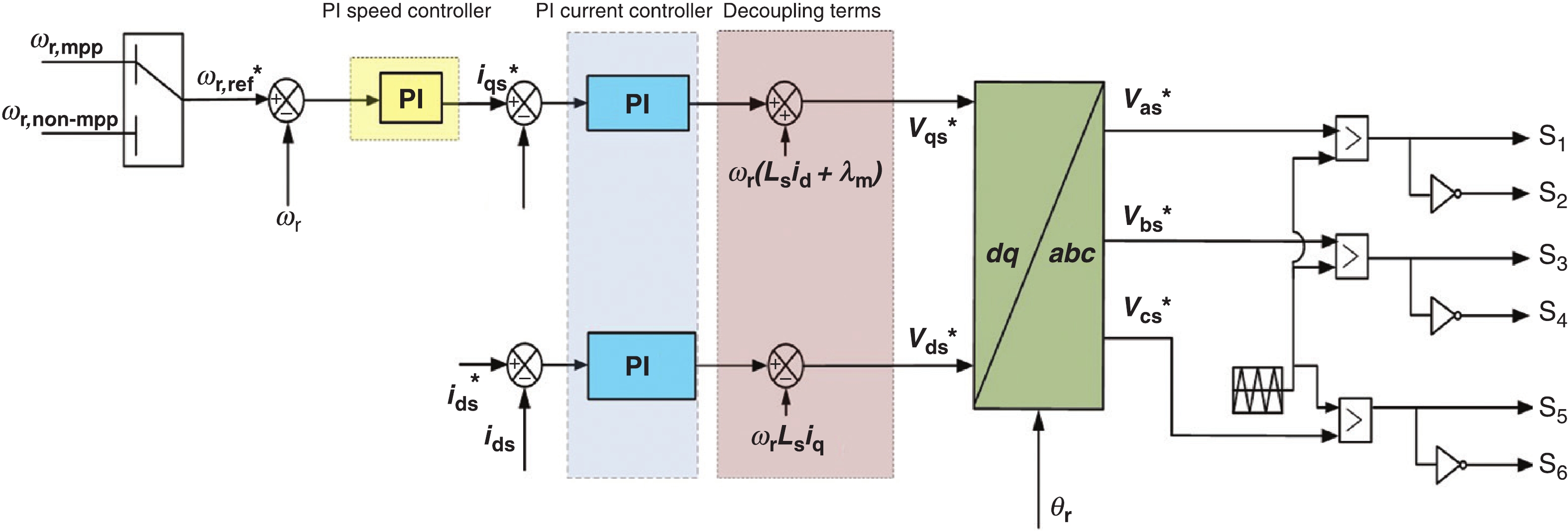
本文报道了一种由永磁同步电动机(permanent magnet synchronous motor, PMSM)提供动力的可被单独使用的泵水系统,其中的永磁同步电动机基于一种由光伏(photovoltaic, PV)装置供电的Boost逆变器。该泵水系统由一块光伏面板、六个开关、三个电感器(L)、三个电容器(C)和一台抽水泵组成。本工作中使用的Boost逆变器电压增益为2,因此驱动电机所需的直流电输入量大幅降低,整套系统的体积也得以缩小。电压增益系数取决于系统中的电感器(L)和电容器(C)数量以及它们的性能参数。根据扰动观察的最大功率点跟踪算法获得了电机转速的参考值。通过矢量控制的方法实现了对逆变器供电型永磁同步电动机的控制。在MATLAB®/Simulink®环境下对所报道的系统进行了仿真计算,还利用现场可编程逻辑门阵列控制器对该型永磁同步电动机的一台实验室原型机开展了实测验证。仿真和实验结果都证明了这一系统的有效性。
本文报道了一种由永磁同步电动机(permanent magnet synchronous motor, PMSM)提供动力的可被单独使用的泵水系统,其中的永磁同步电动机基于一种由光伏(photovoltaic, PV)装置供电的Boost逆变器。该泵水系统由一块光伏面板、六个开关、三个电感器(L)、三个电容器(C)和一台抽水泵组成。本工作中使用的Boost逆变器电压增益为2,因此驱动电机所需的直流电输入量大幅降低,整套系统的体积也得以缩小。电压增益系数取决于系统中的电感器(L)和电容器(C)数量以及它们的性能参数。根据扰动观察的最大功率点跟踪算法获得了电机转速的参考值。通过矢量控制的方法实现了对逆变器供电型永磁同步电动机的控制。在MATLAB®/Simulink®环境下对所报道的系统进行了仿真计算,还利用现场可编程逻辑门阵列控制器对该型永磁同步电动机的一台实验室原型机开展了实测验证。仿真和实验结果都证明了这一系统的有效性。








2022, 6(5): 794-820.
doi: 10.1093/ce/zkac052
摘要:
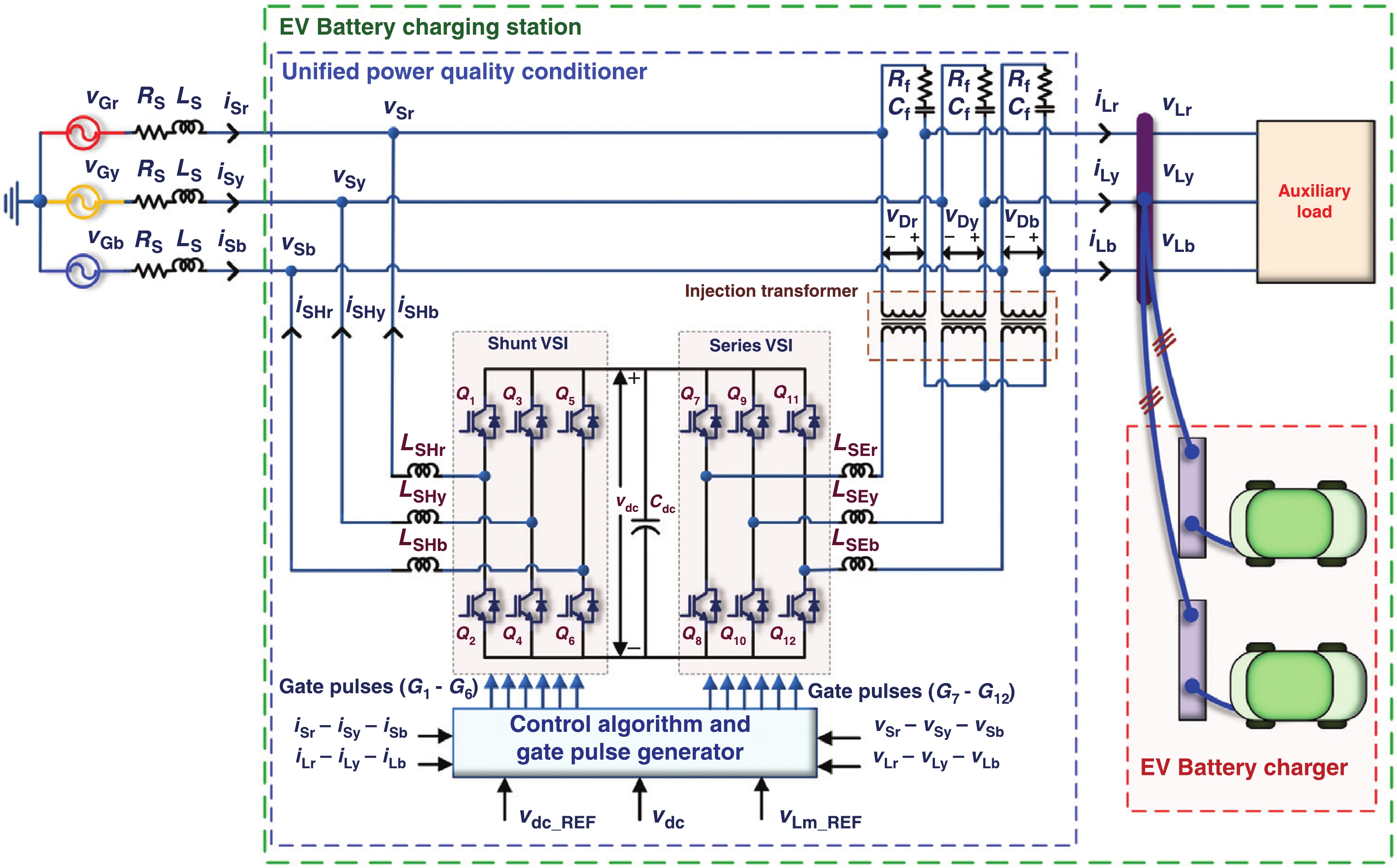
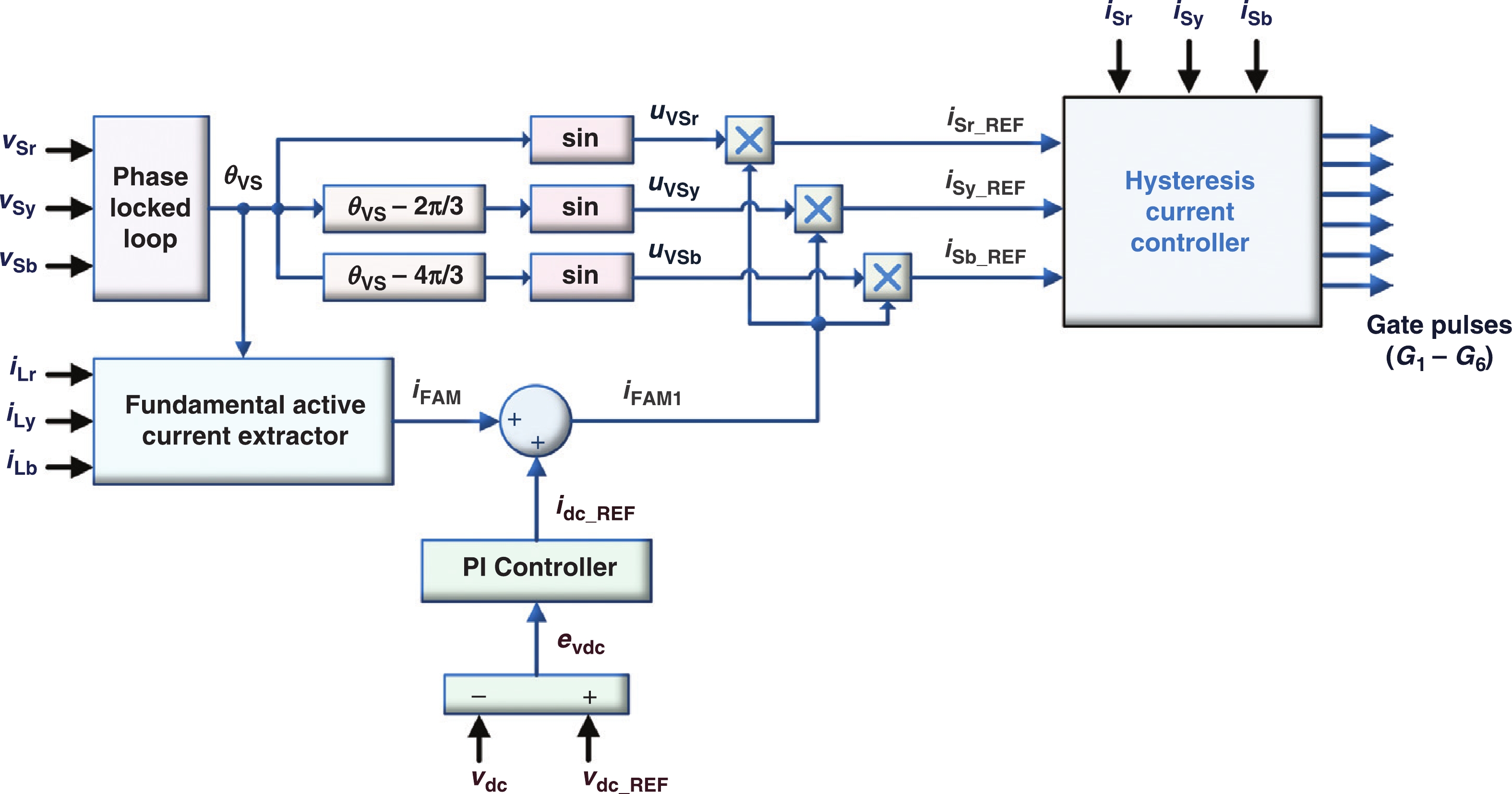
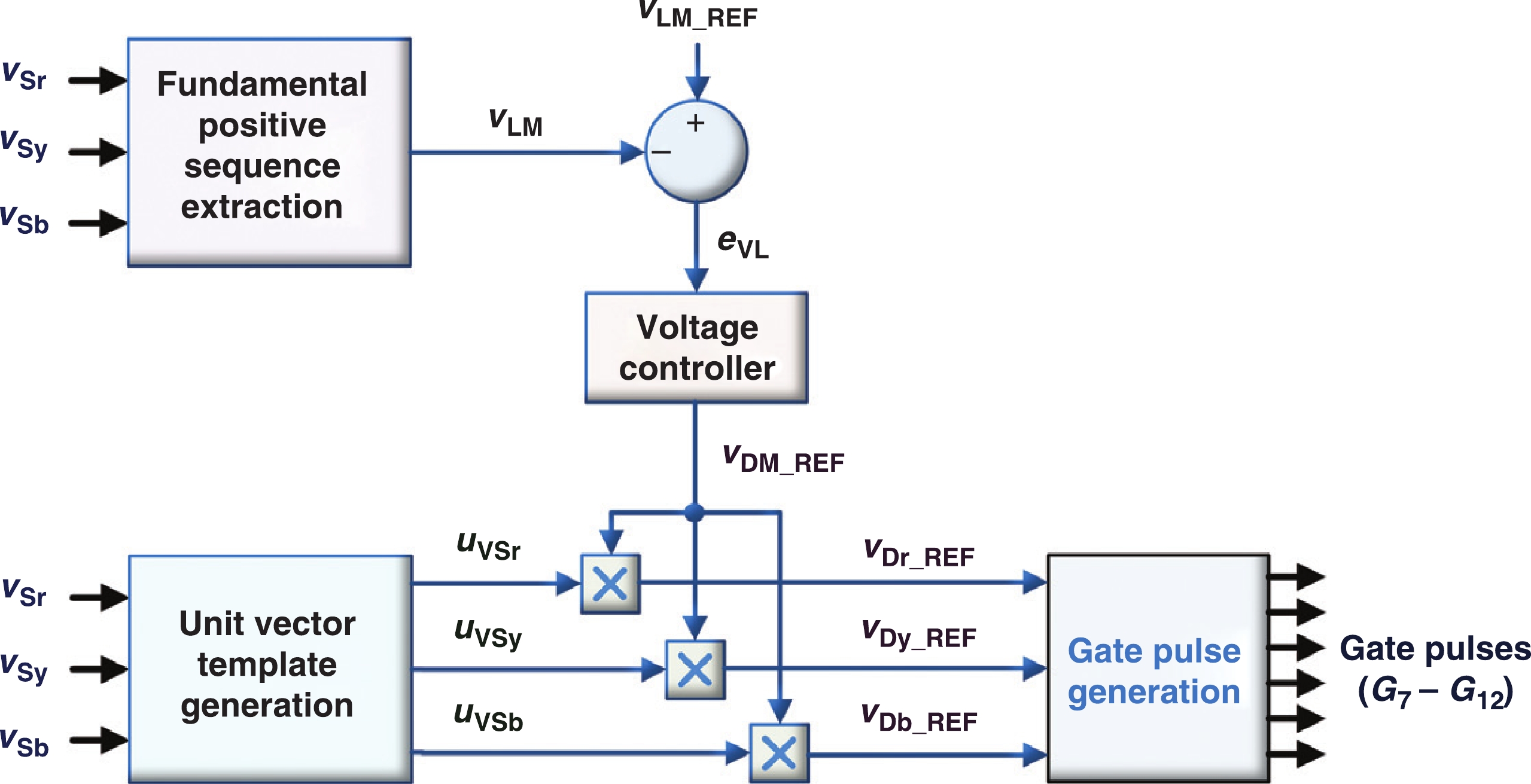
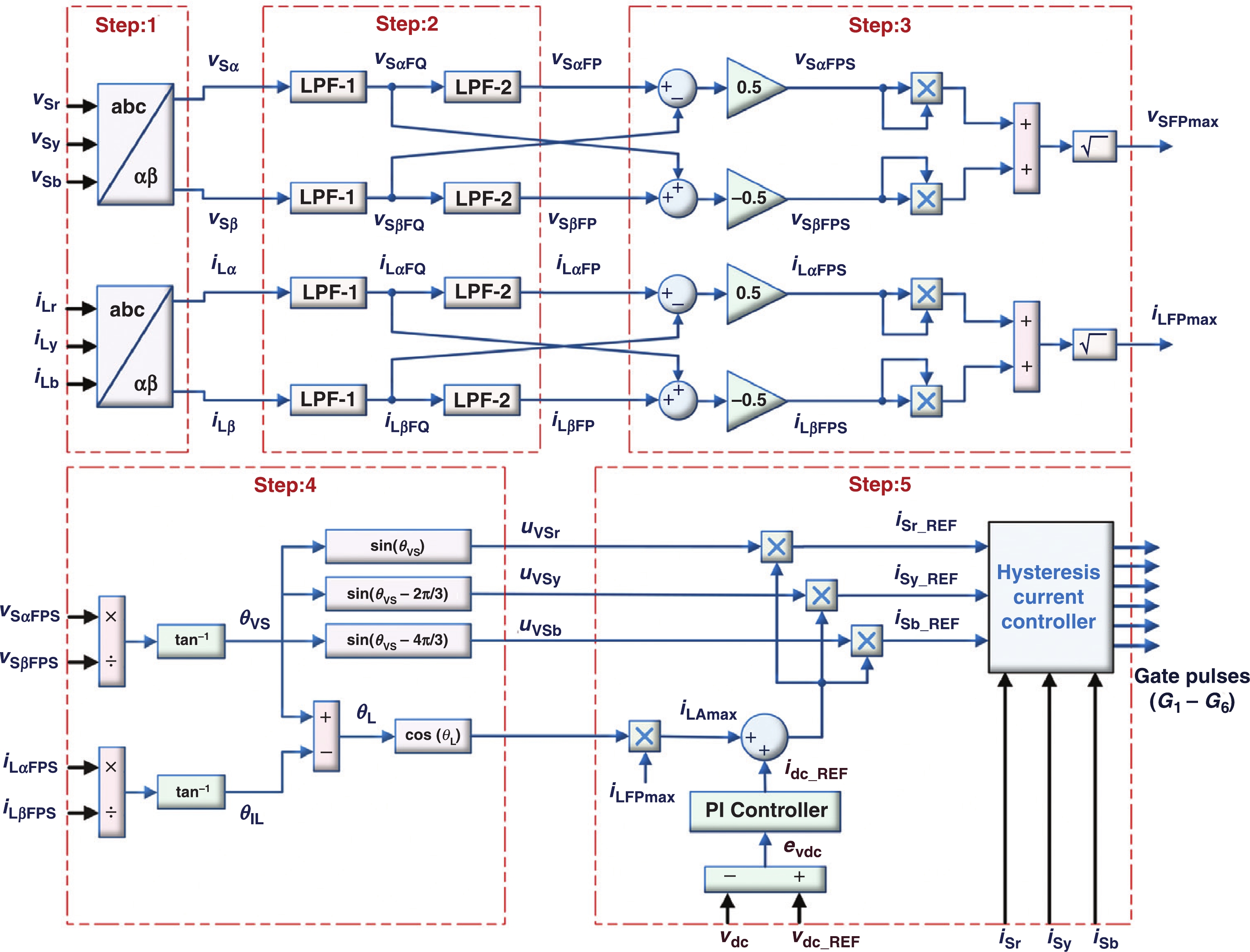
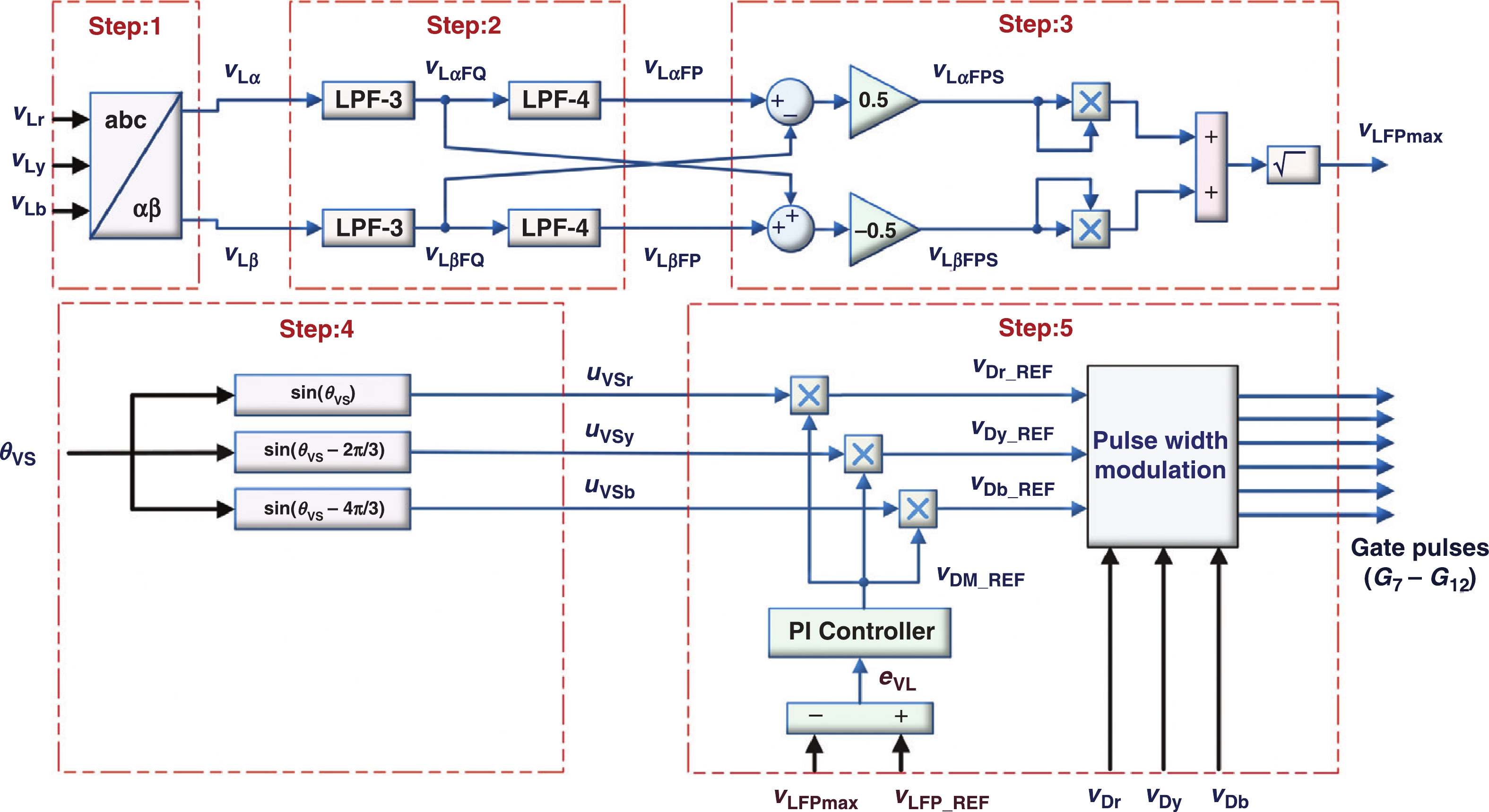
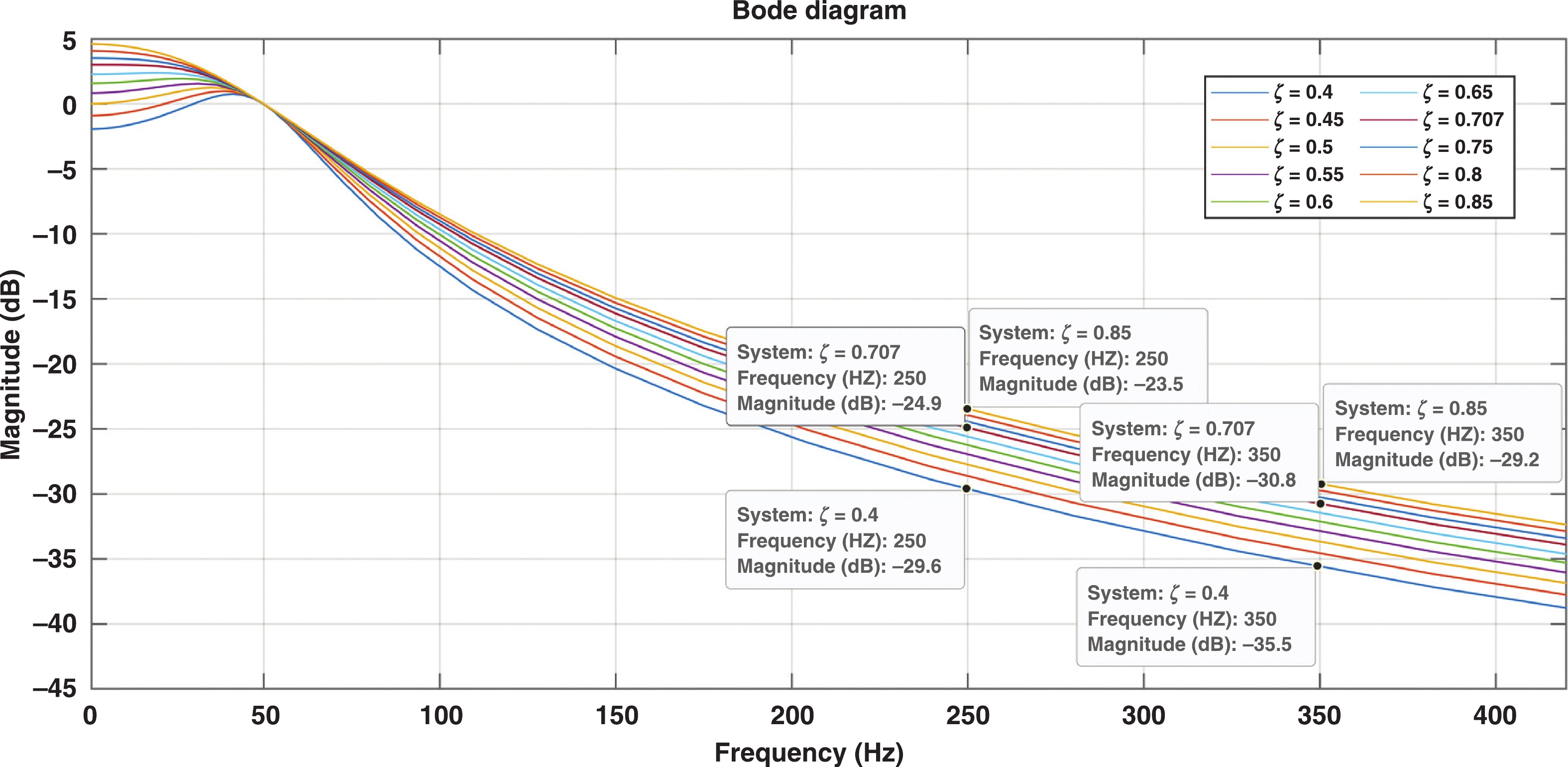
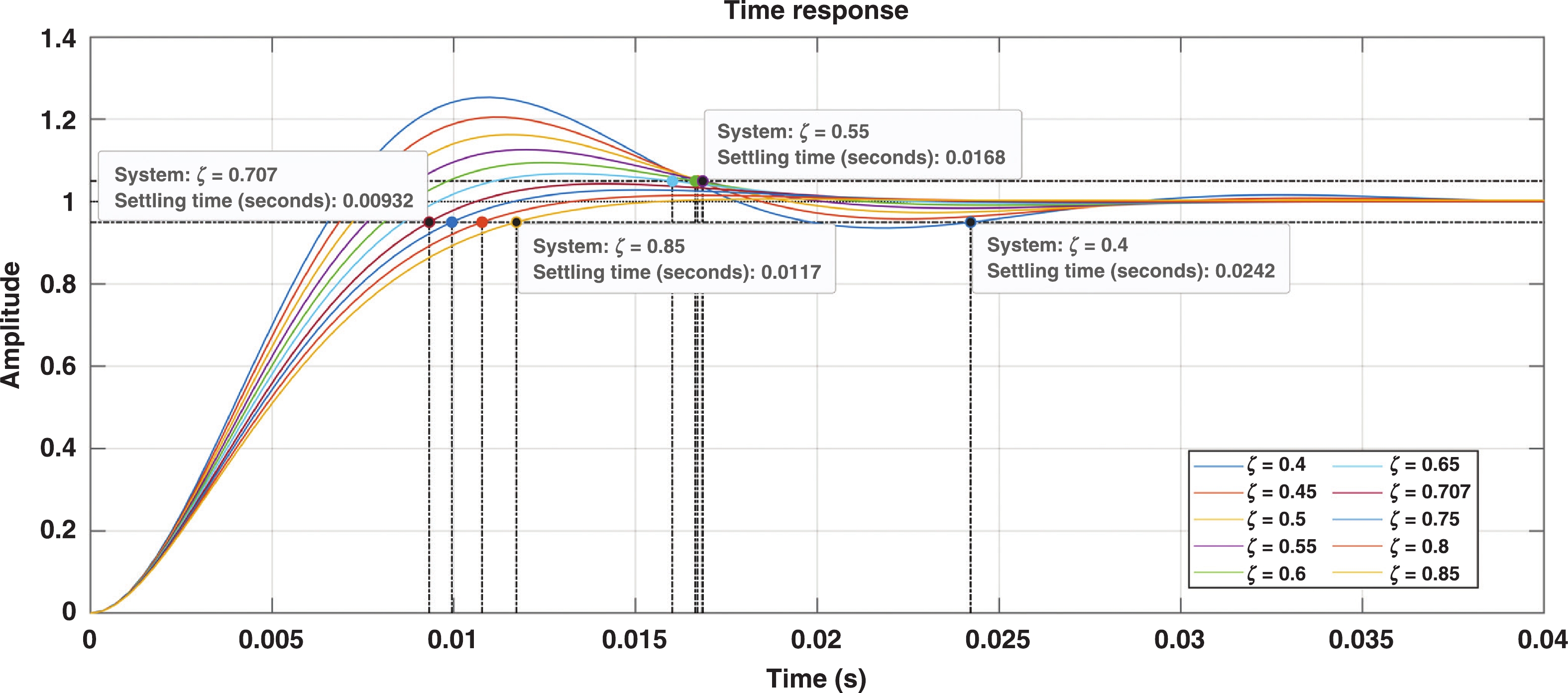
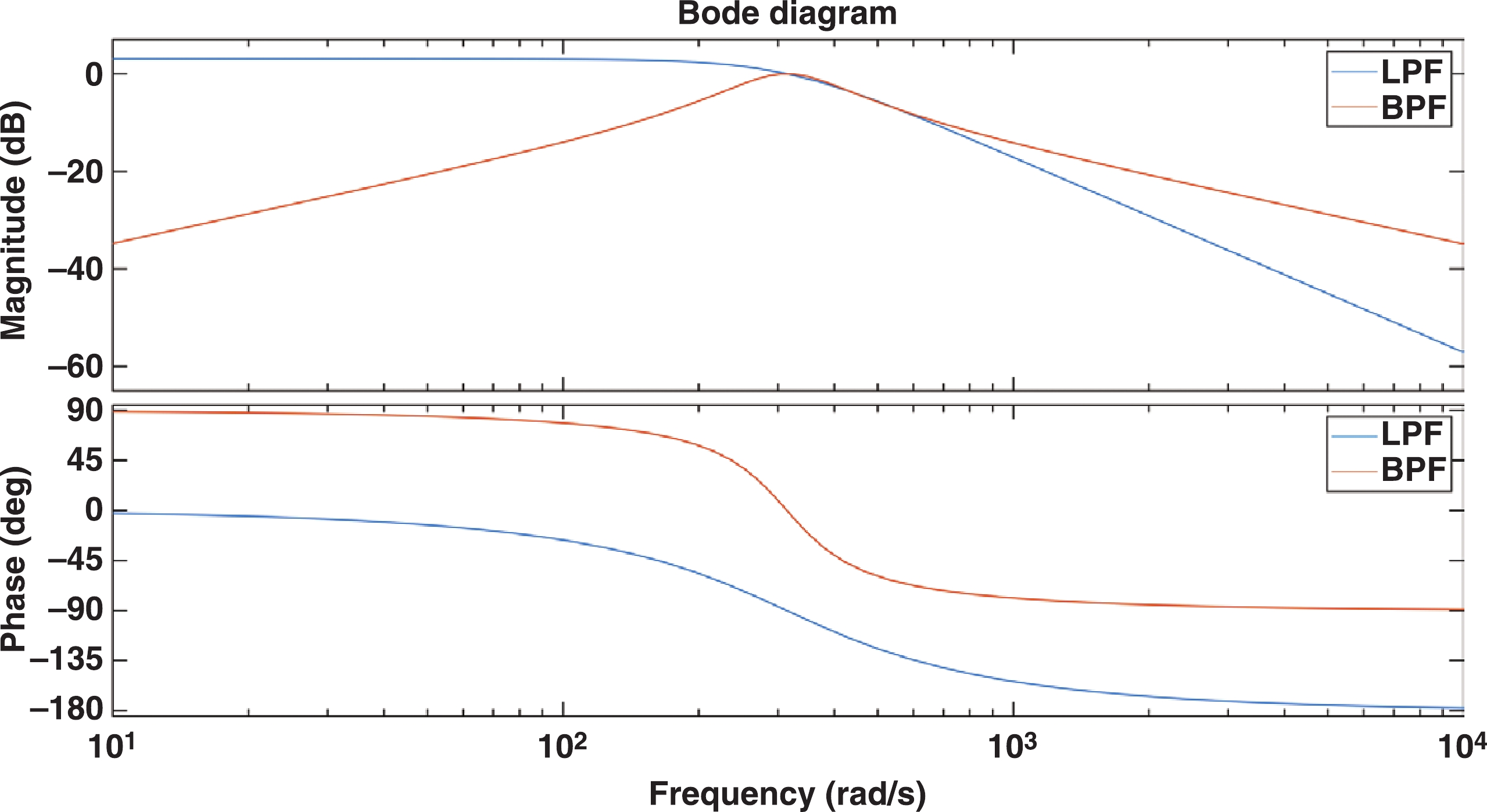
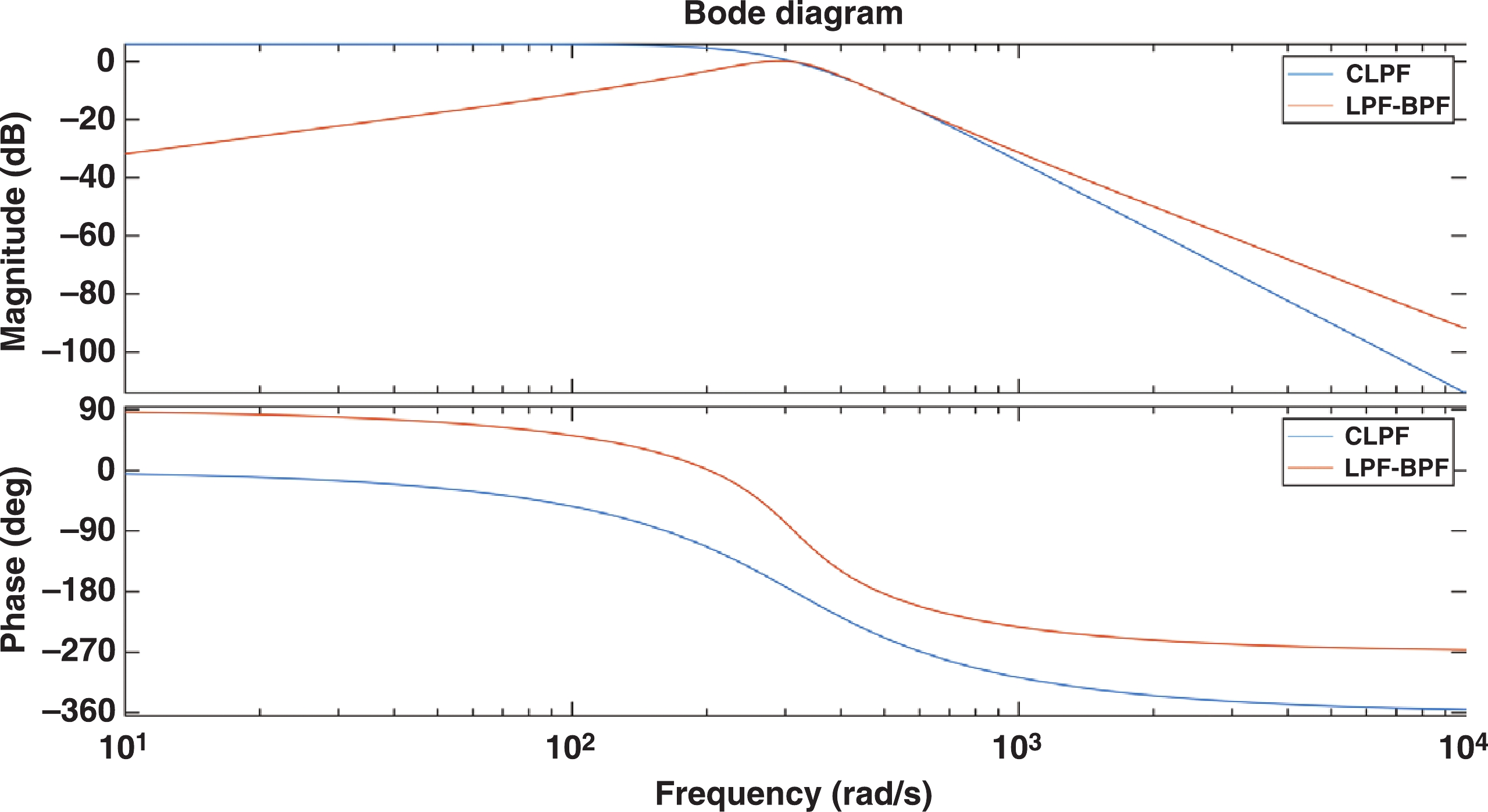
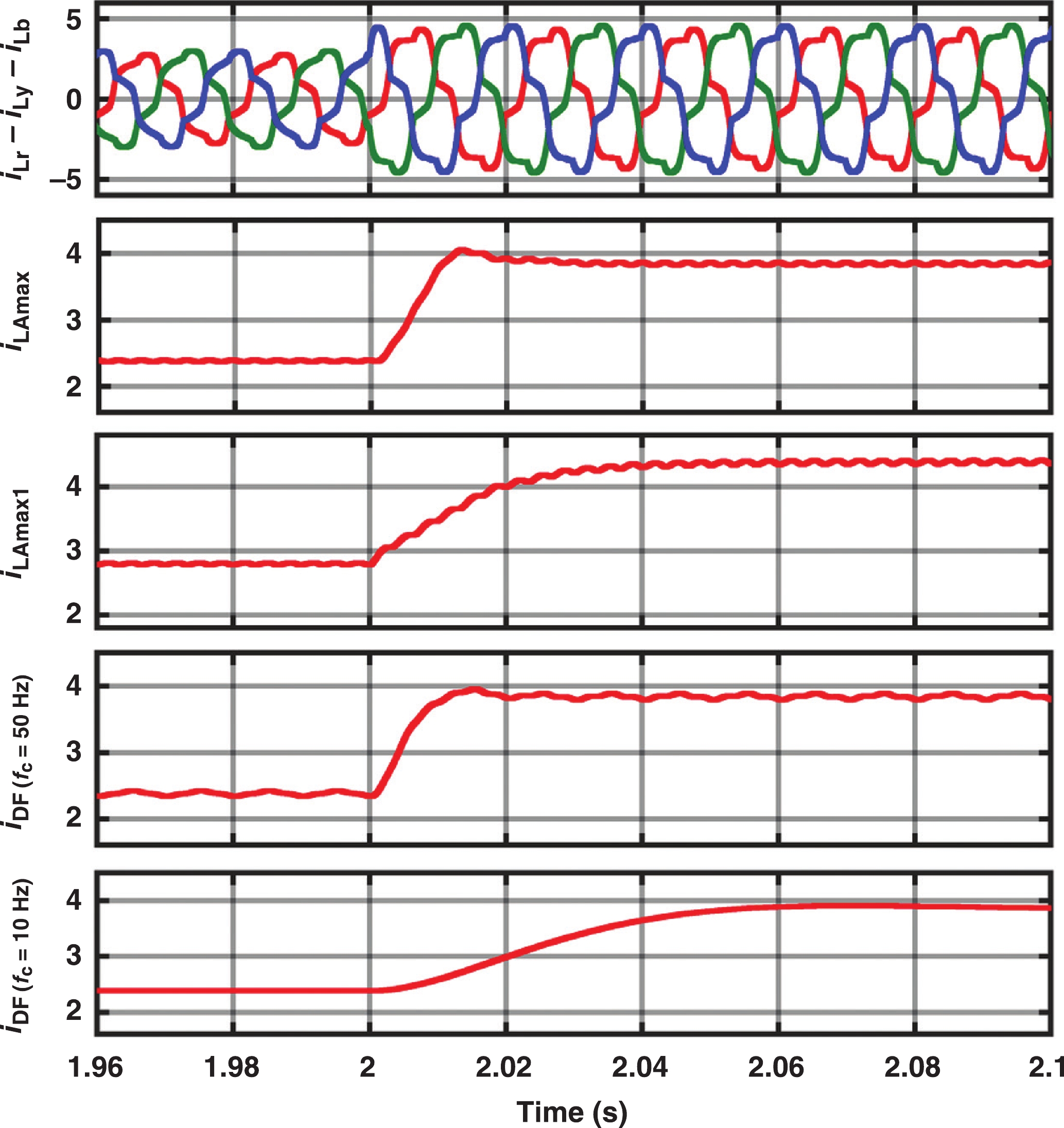
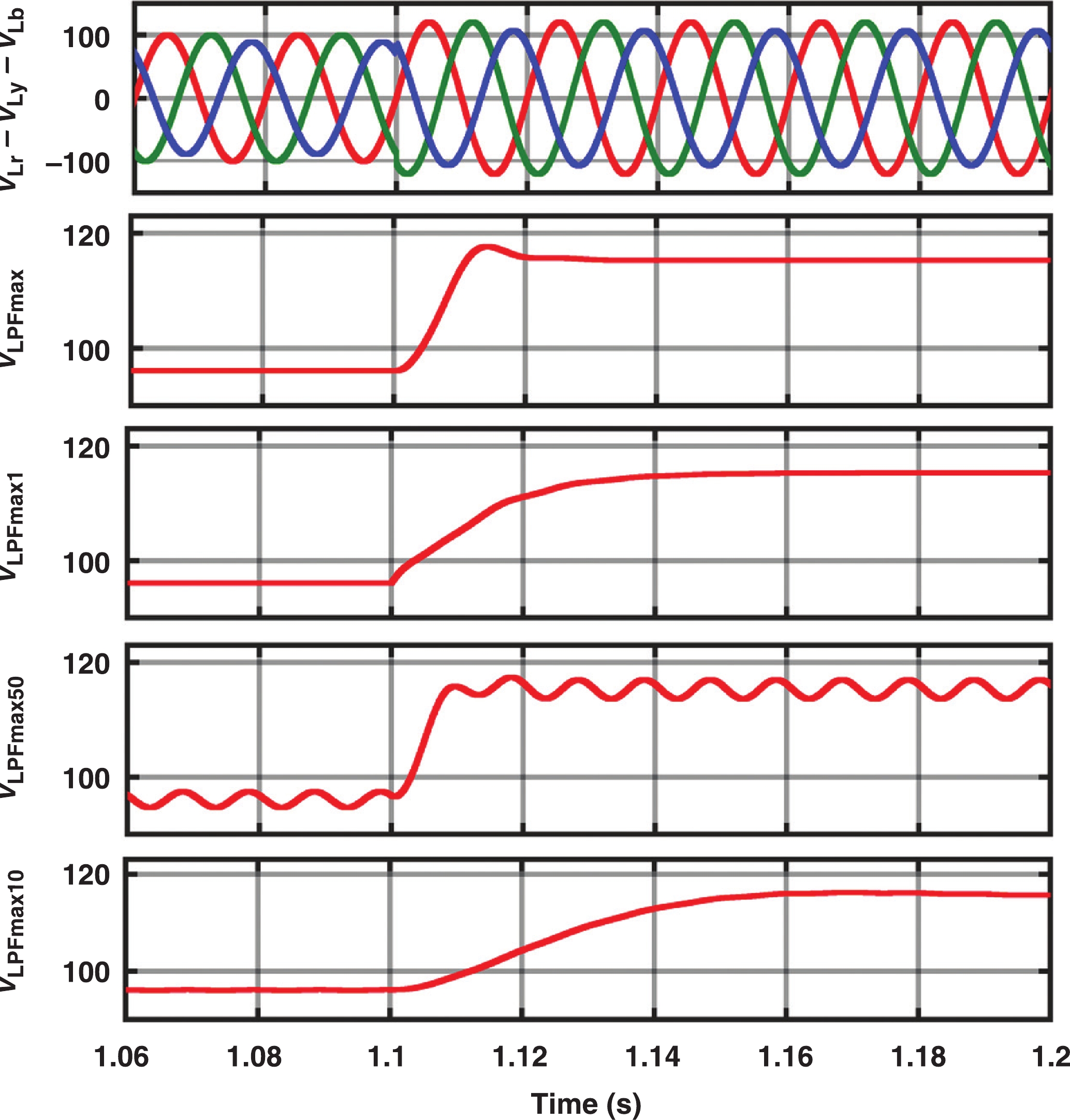
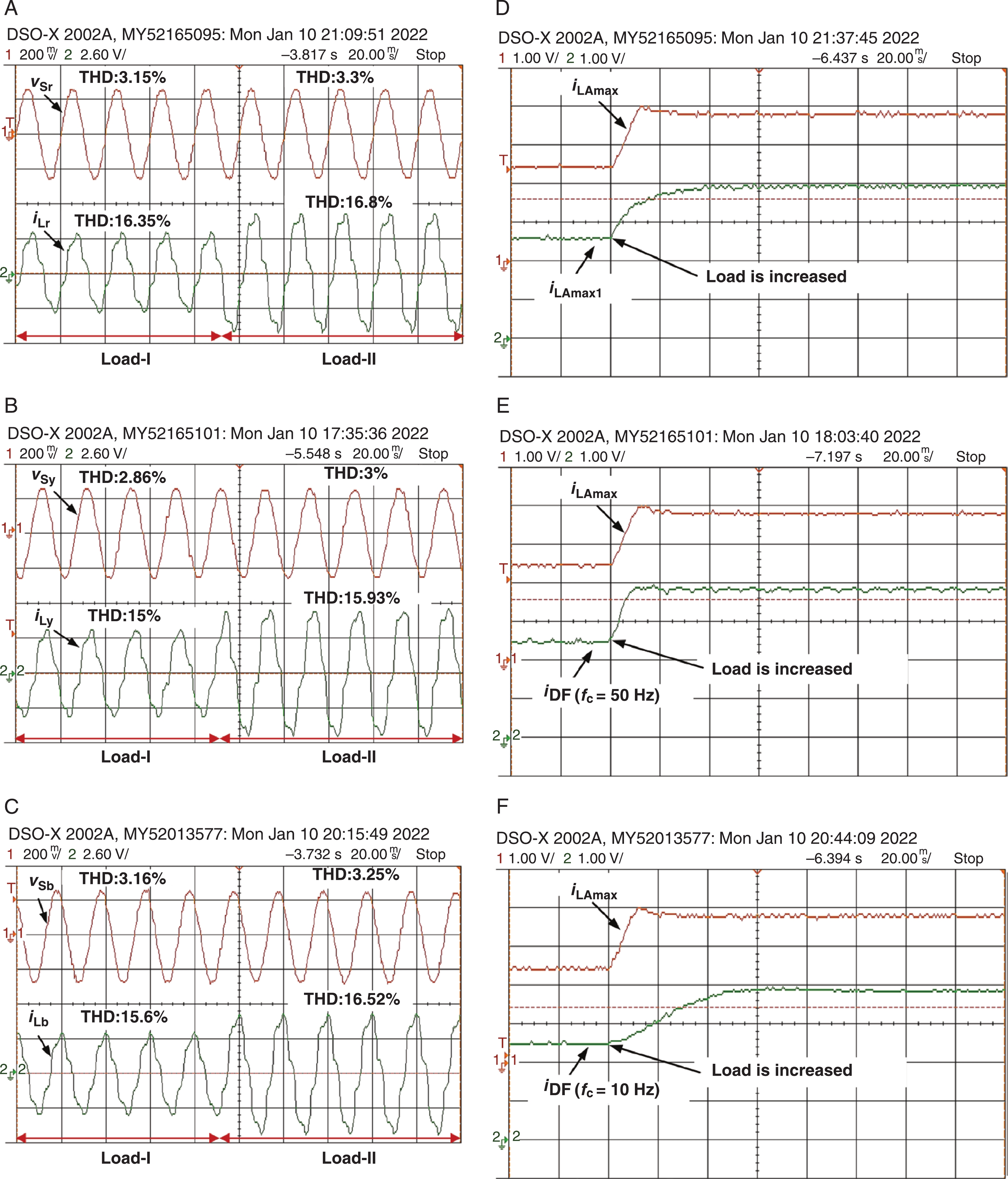
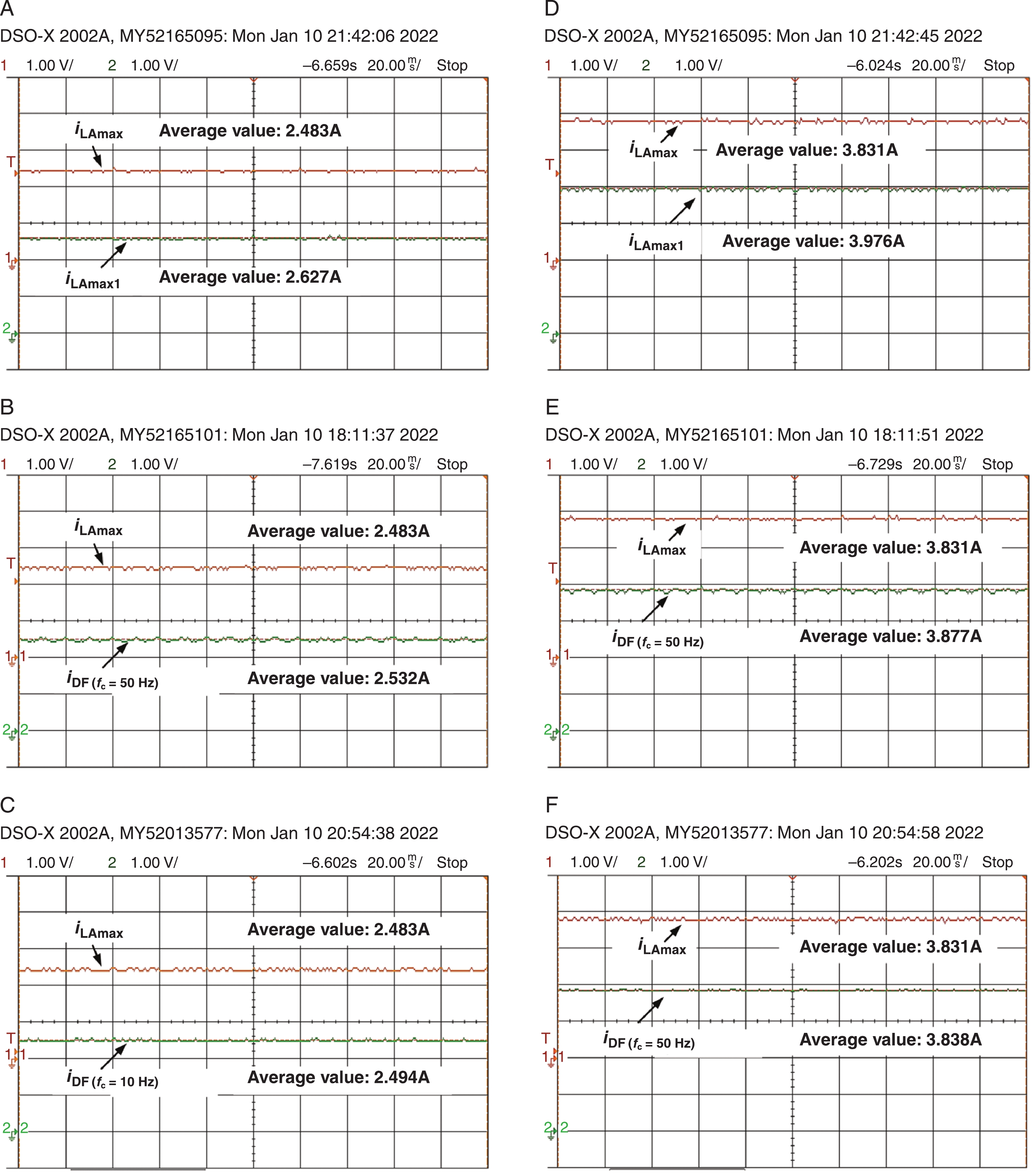
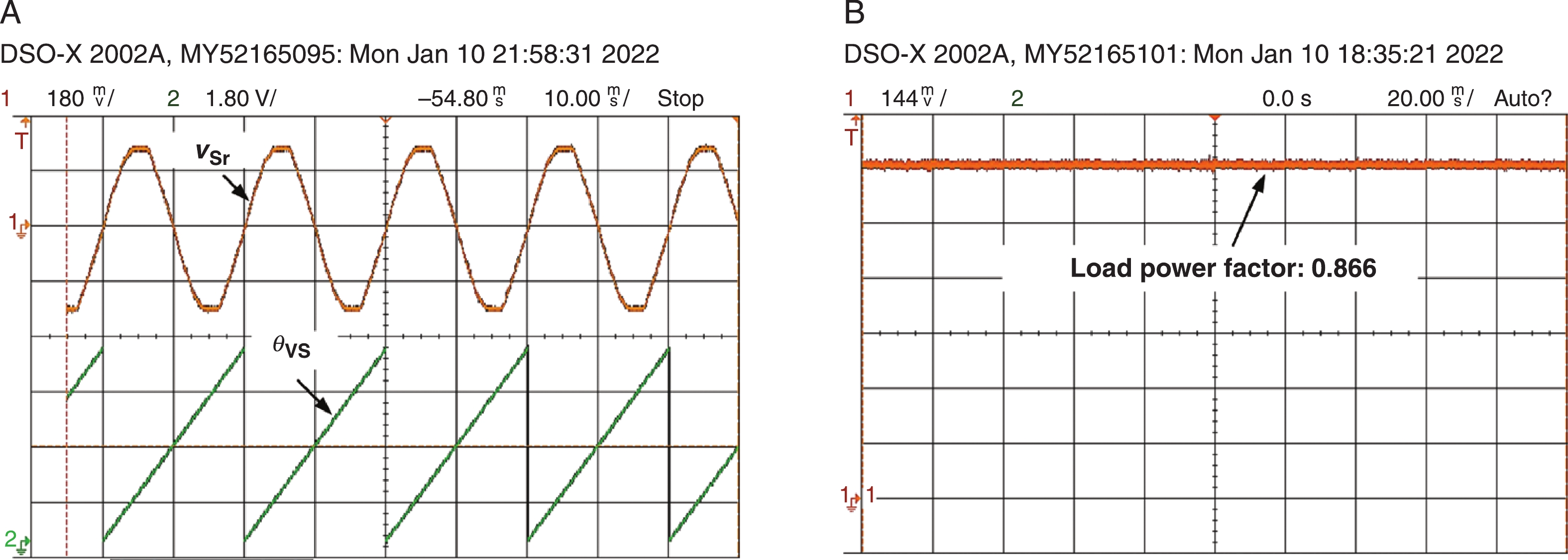
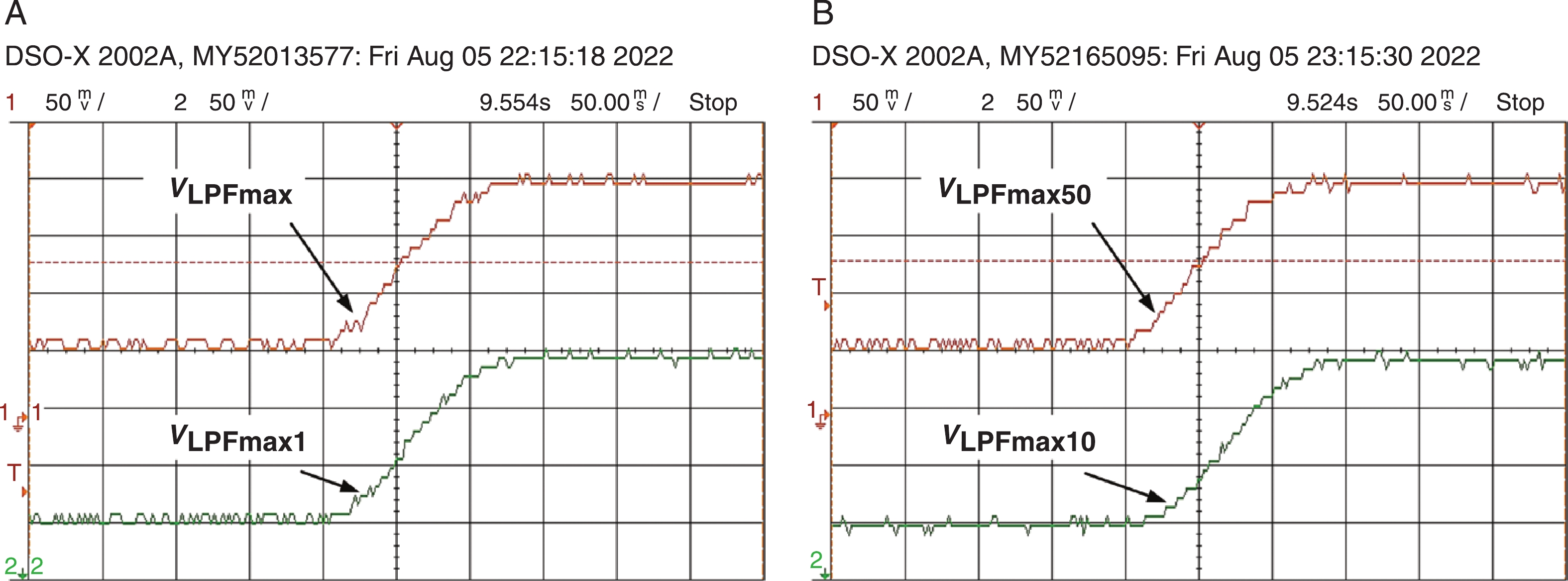
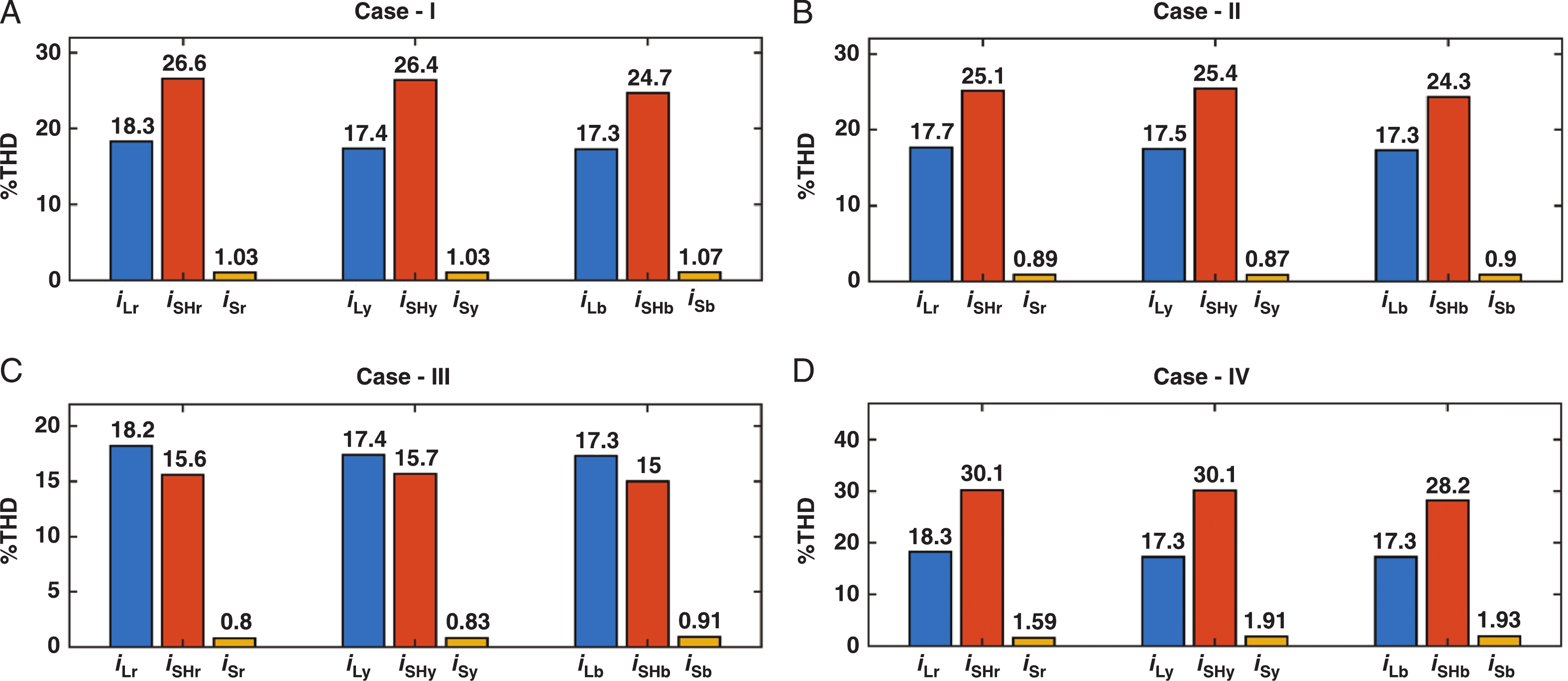
本文提出了一种旨在提升电动汽车(EV)充电站电能质量的统一电能质量调节器(UPQC)控制用级联低通滤波(CLPF)方案。经加设UPQC,电动汽车充电站能以统一功率因数吸取正弦电流,电源电压也能保持于充电器标称输入电压。CLPF方案用两个LPF级联单独处理负载电流的α–β分量,进而确定相应的基波正交分量。根据确定的基波正交分量计算得出负载电流基波正序分量(FPSC)的瞬时值、峰值及相位角。也可由CLPF方案计算得出负载及电源电压相关量。经计算负载电流及电源电压得出负载电流单位电压模板(UVT)、功率因数、基波有功分量(FAC)。根据负载电流FAC及UVT计算得出并联补偿控制的参考电流。此外,也可借助UVT及负载电压FPSC峰值振幅实施串联补偿控制。本文以仿真及实验研究比较了基于CLPF方案与早期报告方案的性能。其性能比较表明,提议方案动态响应更快,稳态响应更准。经分析不同操作条件下电动汽车充电站UPQC的CLPF方案控制的性能,发现以该方案运行的发电站实现了必要无功补偿,缓解了电压暂降/暂升,防止了谐波与不平衡电流输入电网,提高了充电器运行可靠性,节约了能源,还提升了配电网效率。
本文提出了一种旨在提升电动汽车(EV)充电站电能质量的统一电能质量调节器(UPQC)控制用级联低通滤波(CLPF)方案。经加设UPQC,电动汽车充电站能以统一功率因数吸取正弦电流,电源电压也能保持于充电器标称输入电压。CLPF方案用两个LPF级联单独处理负载电流的α–β分量,进而确定相应的基波正交分量。根据确定的基波正交分量计算得出负载电流基波正序分量(FPSC)的瞬时值、峰值及相位角。也可由CLPF方案计算得出负载及电源电压相关量。经计算负载电流及电源电压得出负载电流单位电压模板(UVT)、功率因数、基波有功分量(FAC)。根据负载电流FAC及UVT计算得出并联补偿控制的参考电流。此外,也可借助UVT及负载电压FPSC峰值振幅实施串联补偿控制。本文以仿真及实验研究比较了基于CLPF方案与早期报告方案的性能。其性能比较表明,提议方案动态响应更快,稳态响应更准。经分析不同操作条件下电动汽车充电站UPQC的CLPF方案控制的性能,发现以该方案运行的发电站实现了必要无功补偿,缓解了电压暂降/暂升,防止了谐波与不平衡电流输入电网,提高了充电器运行可靠性,节约了能源,还提升了配电网效率。








2022, 6(5): 821-835.
doi: 10.1093/ce/zkac057
摘要:
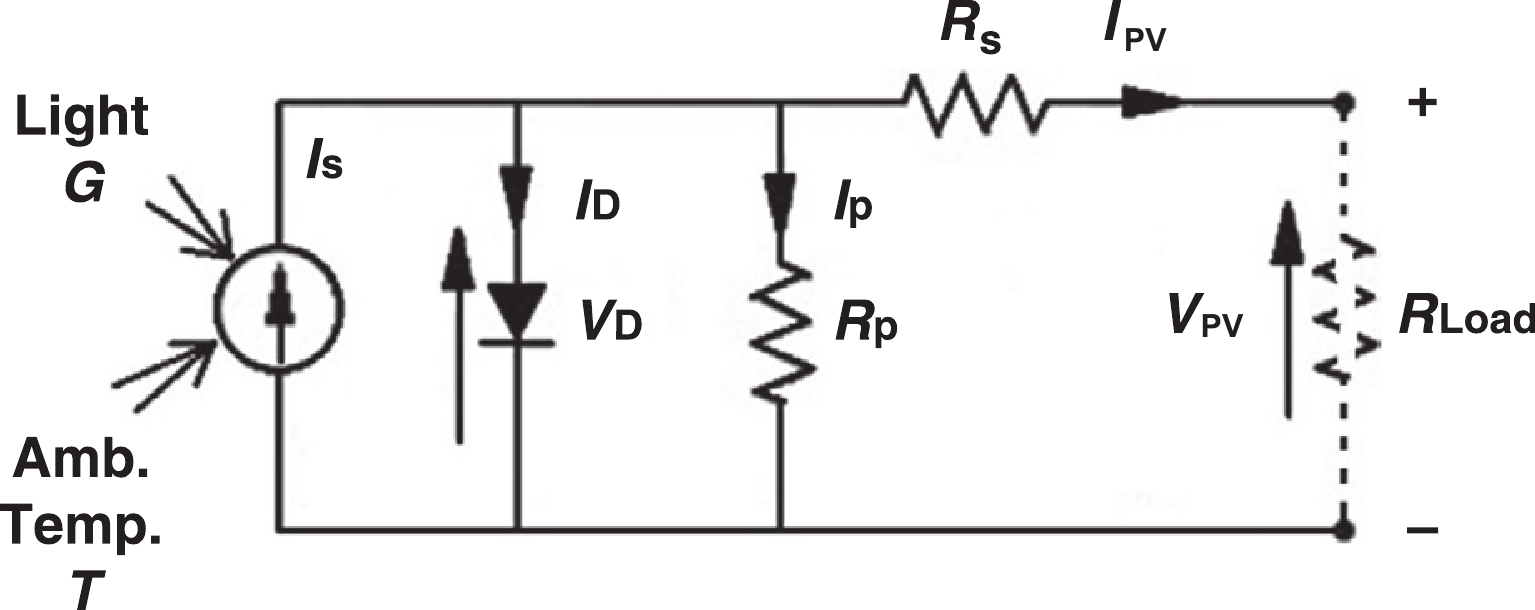
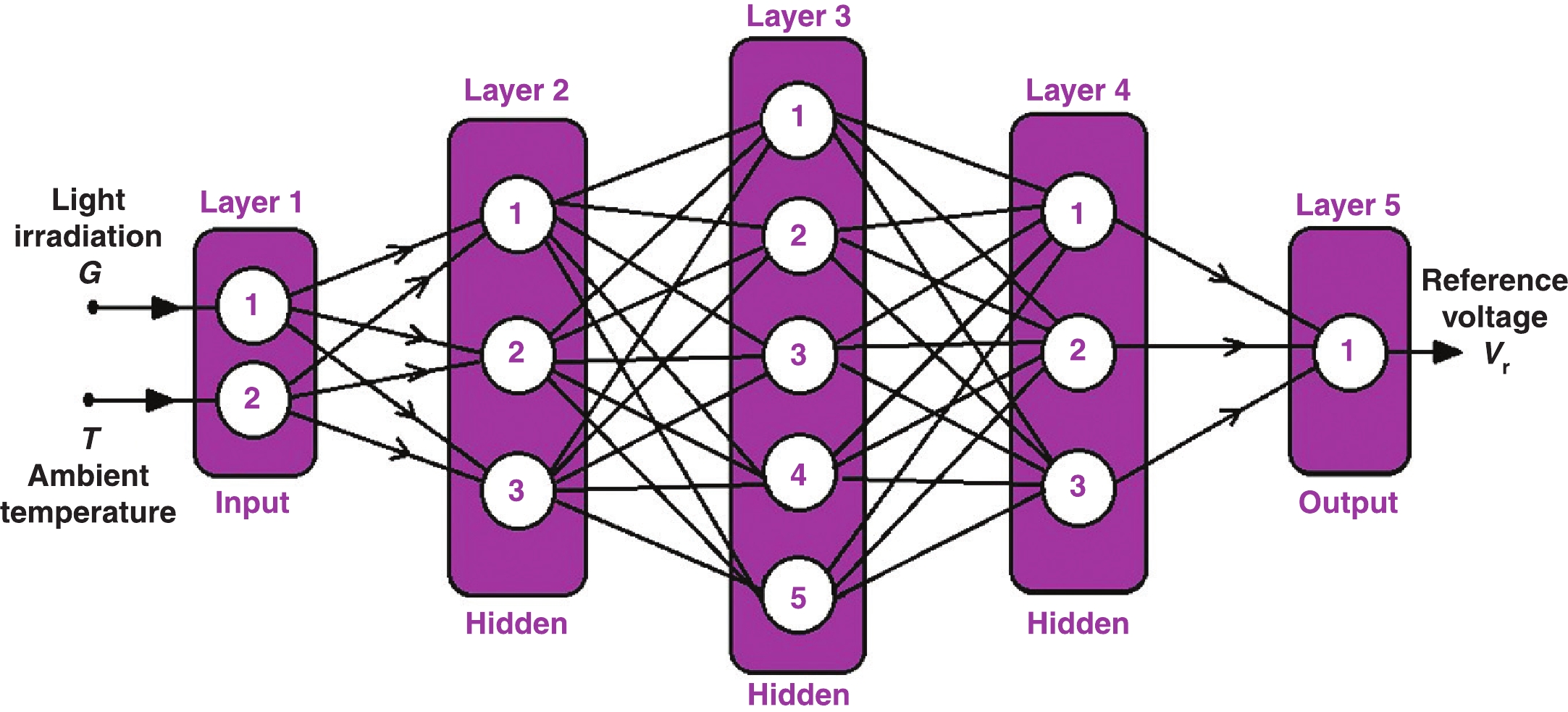
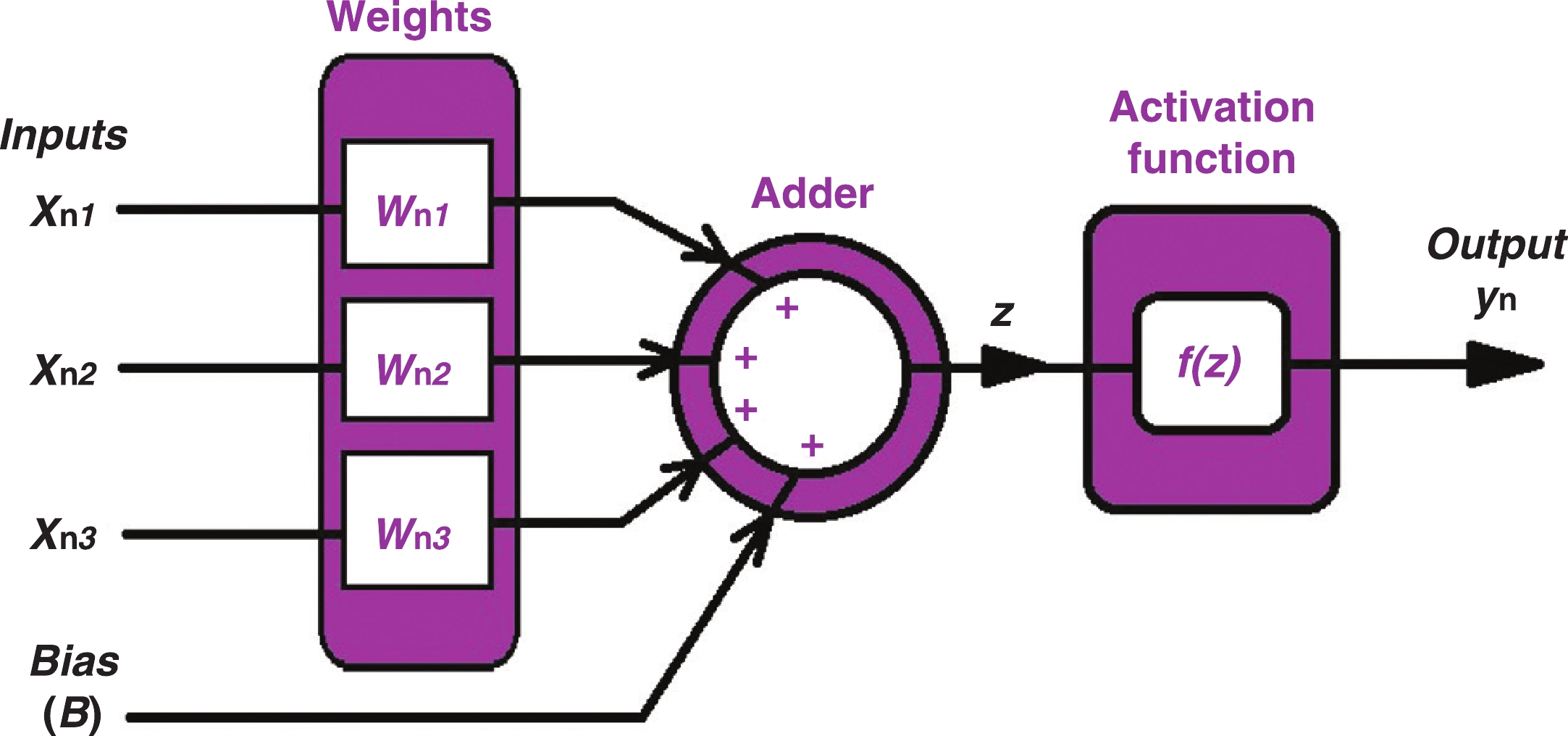
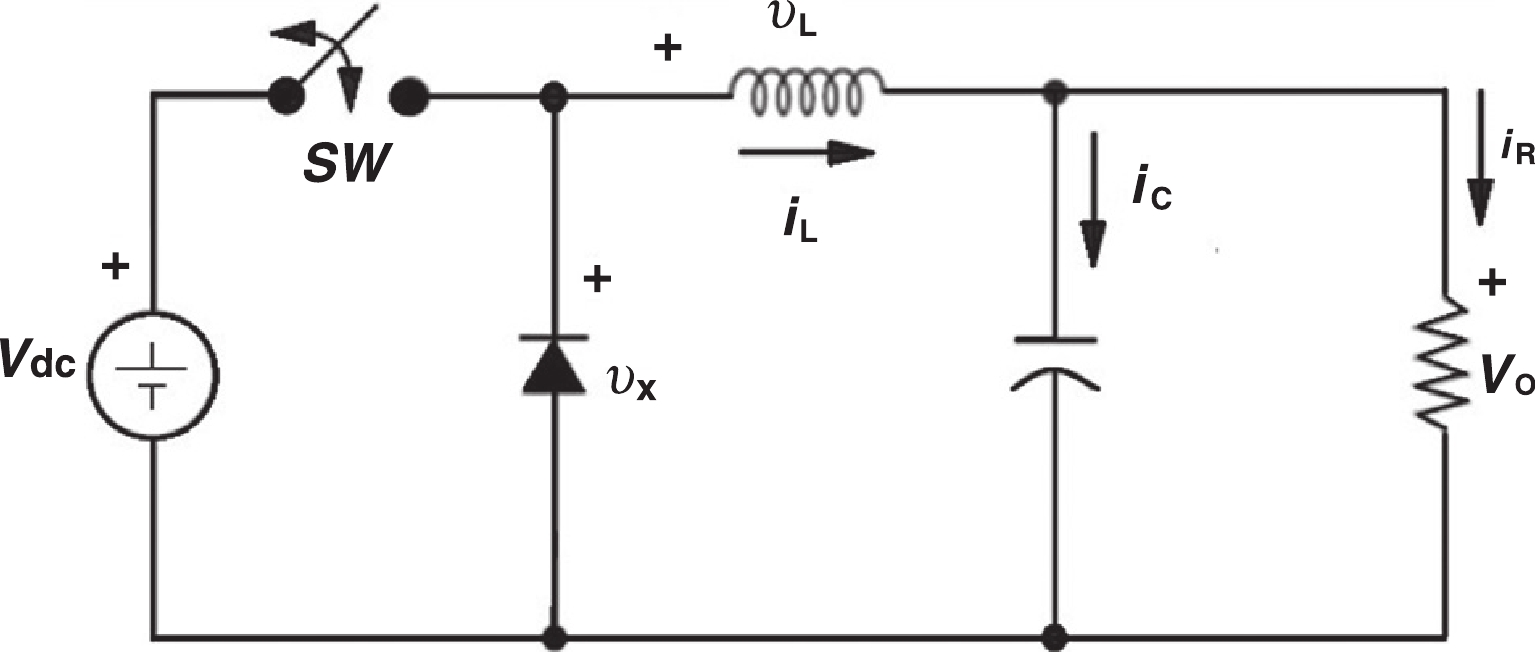
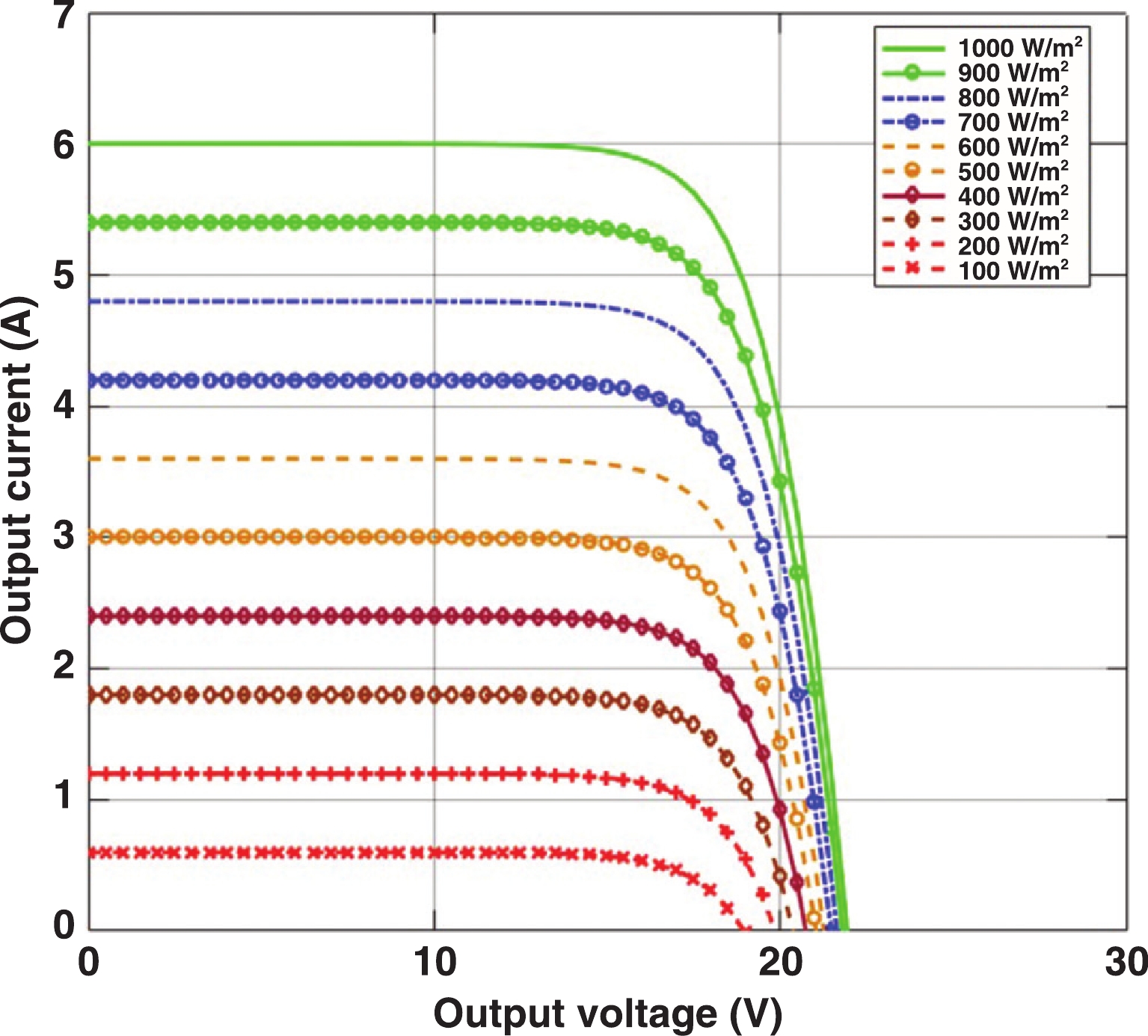
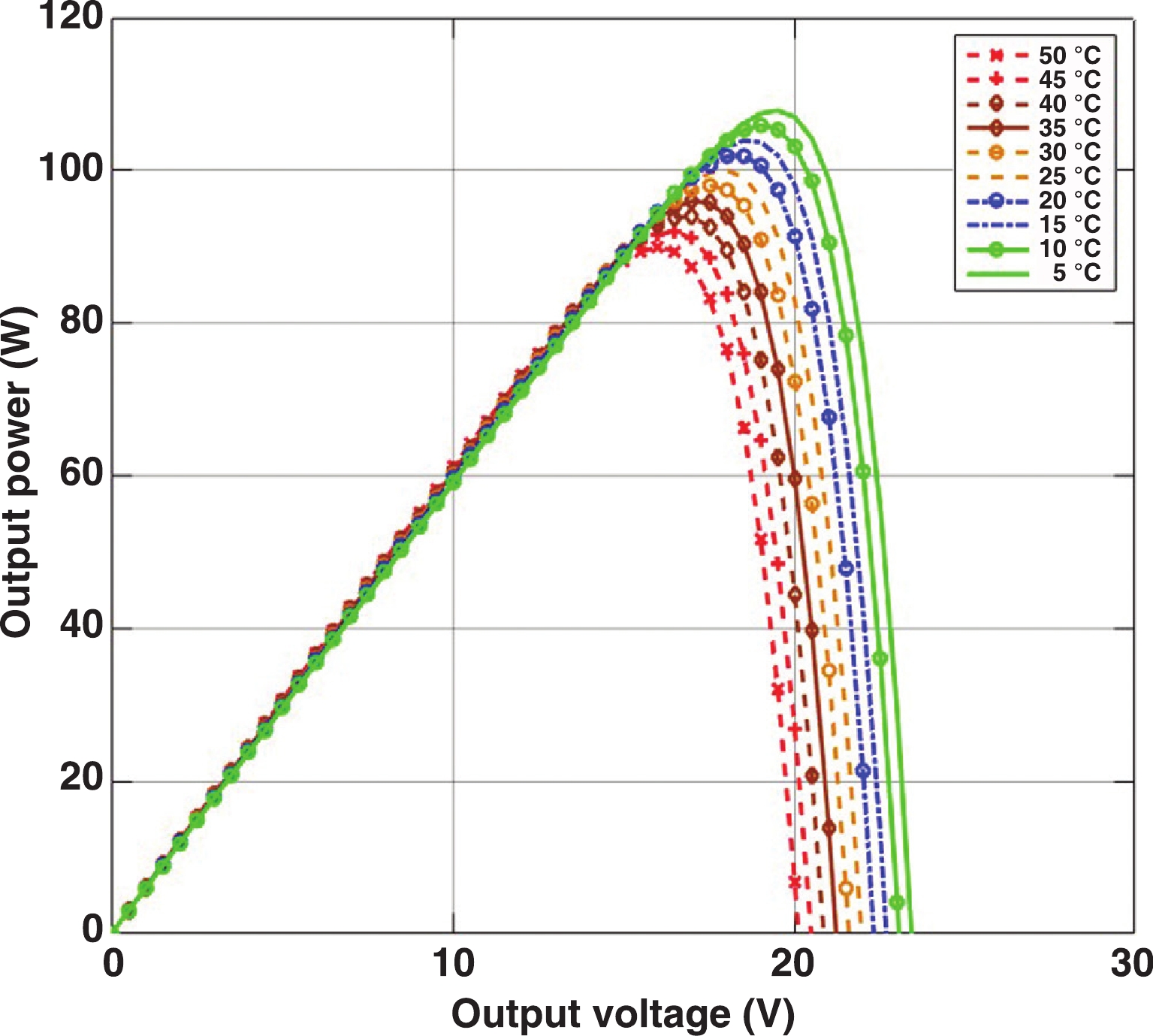
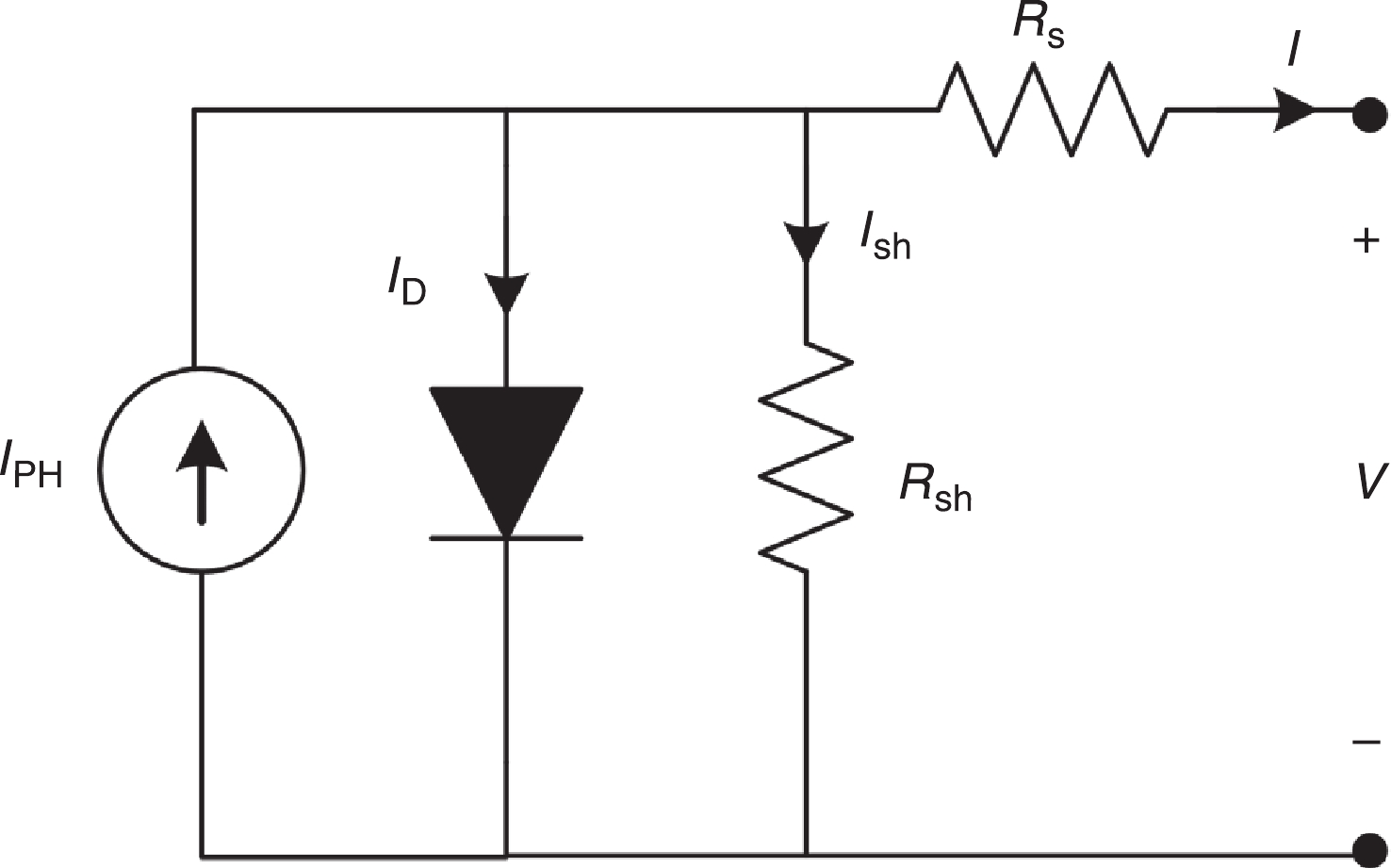
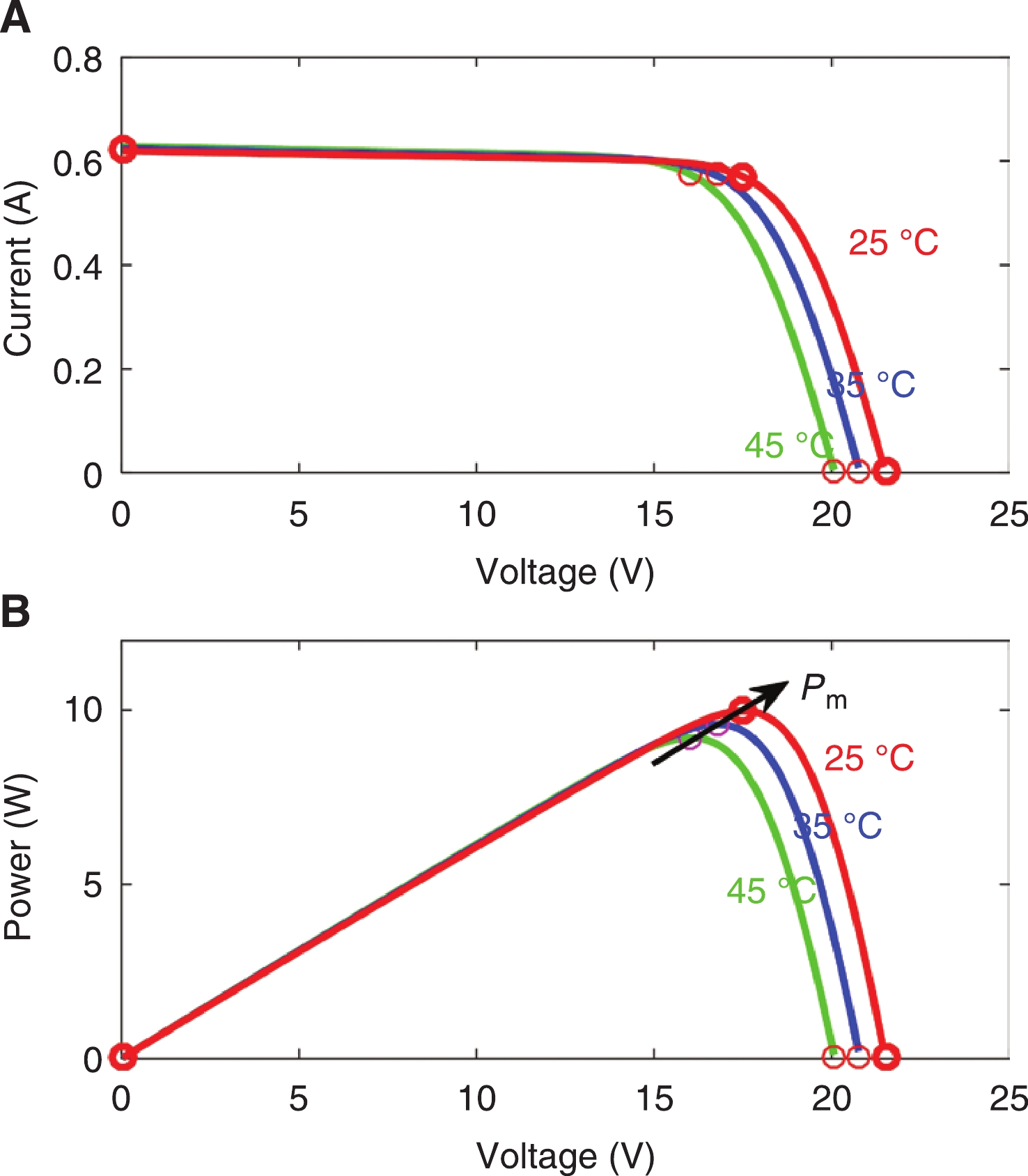
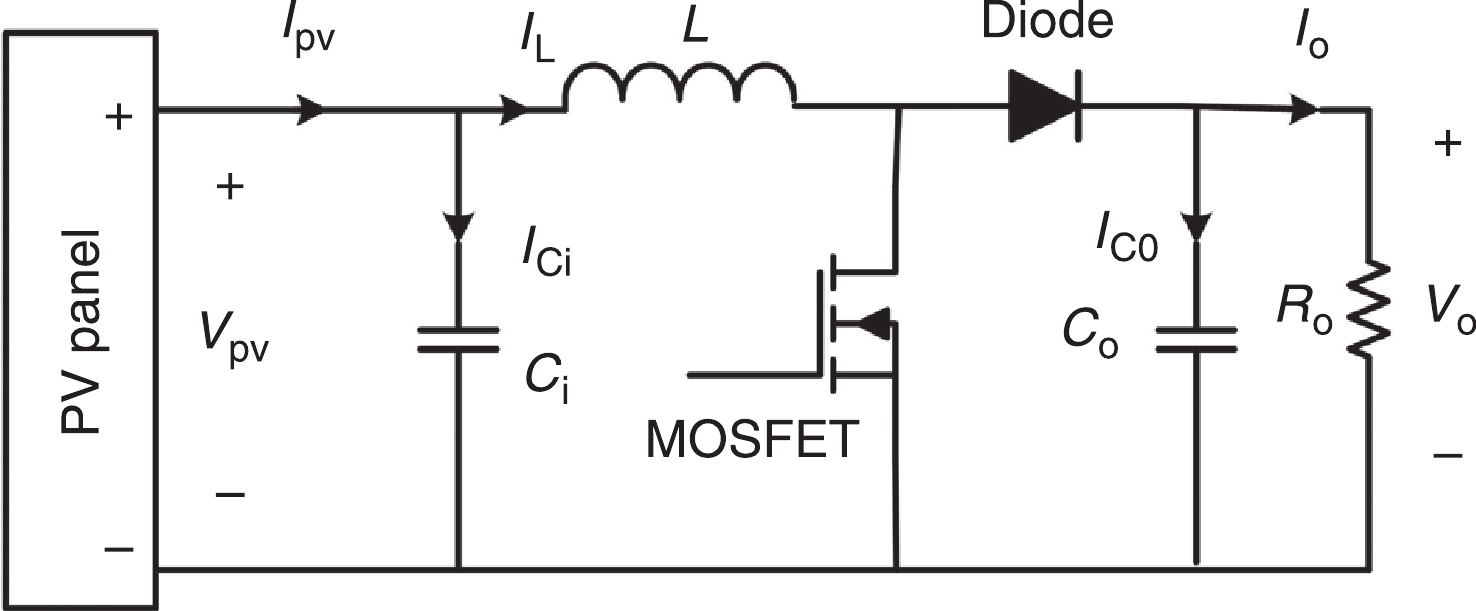
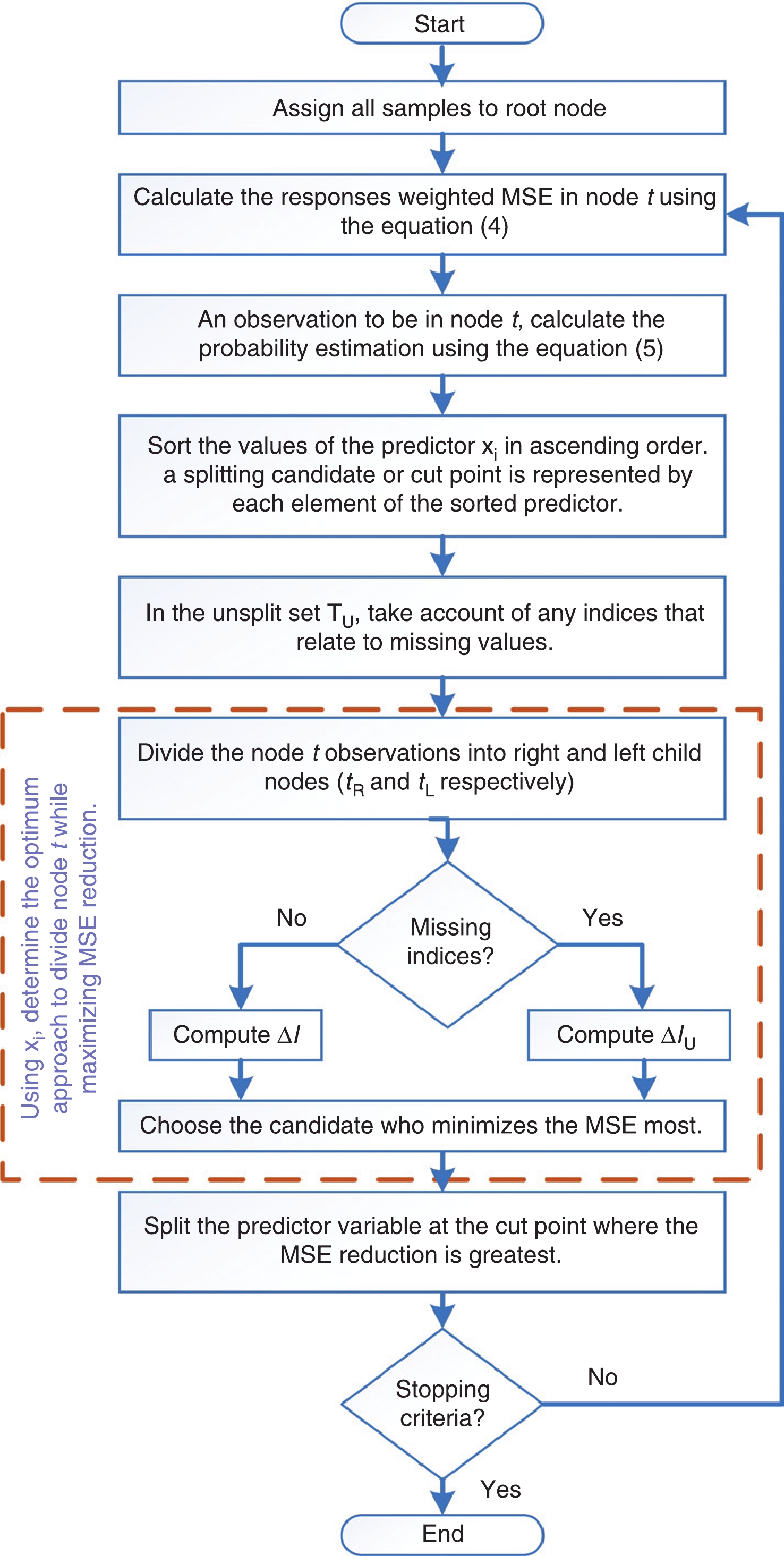
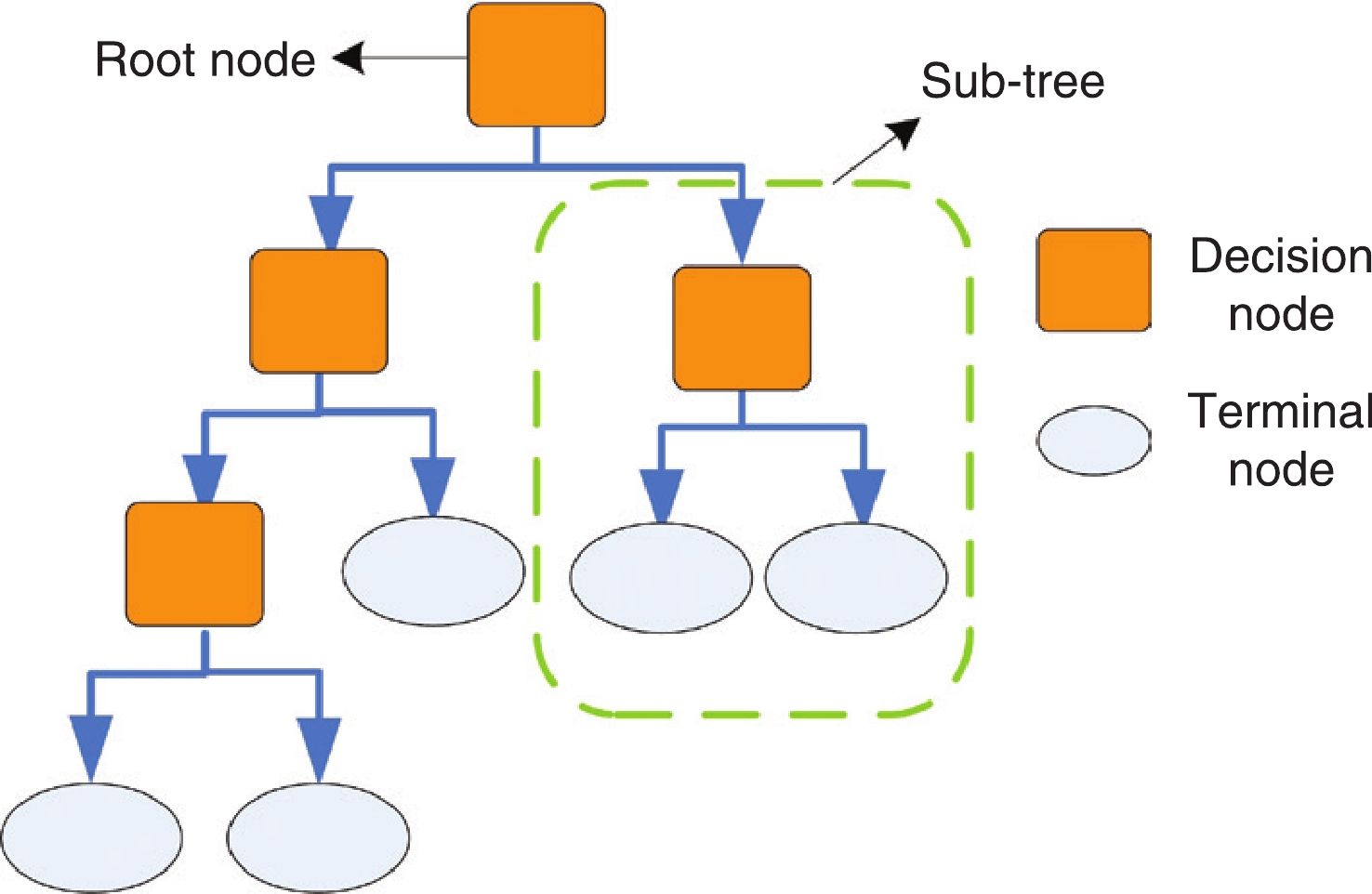
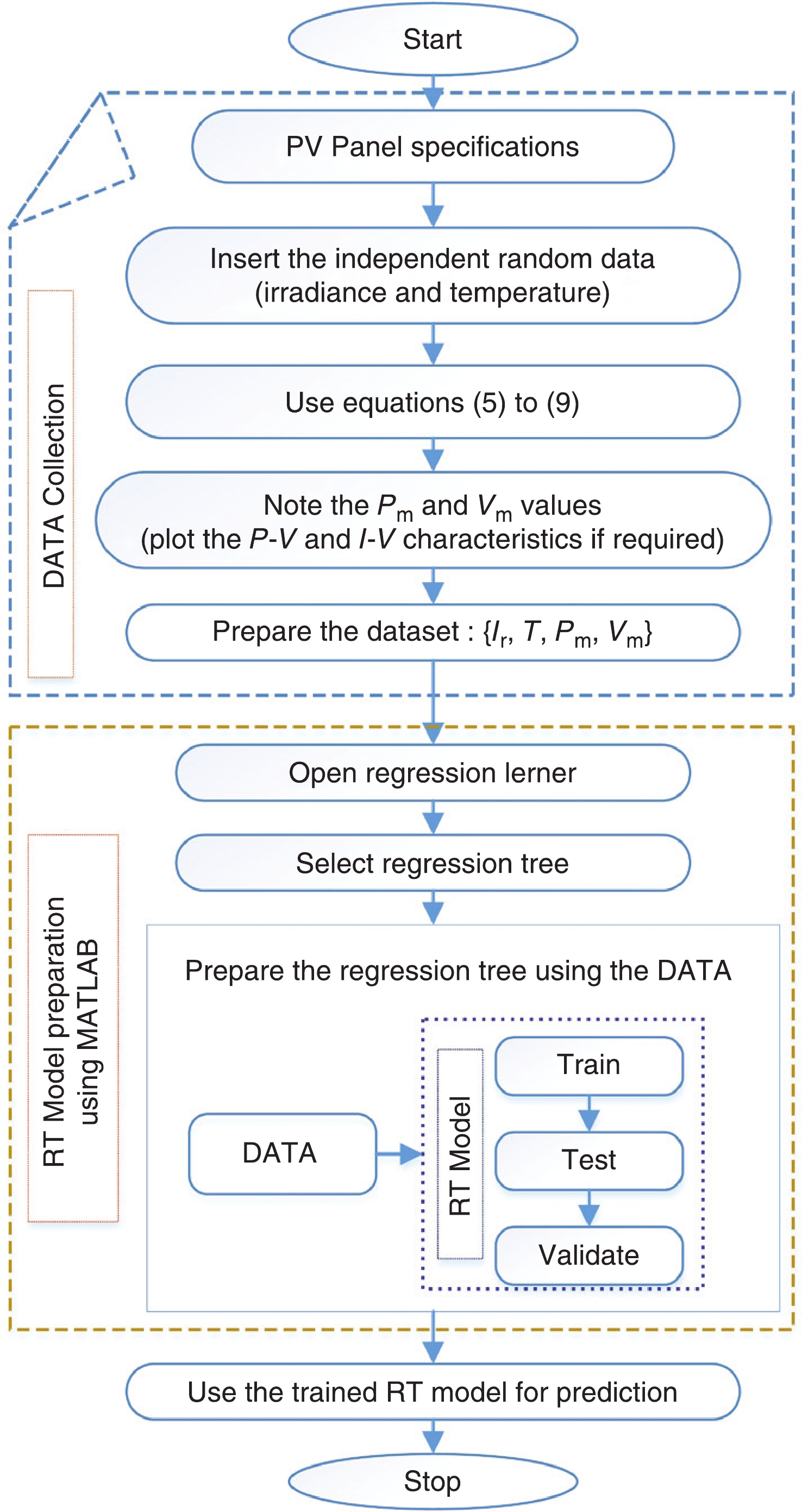
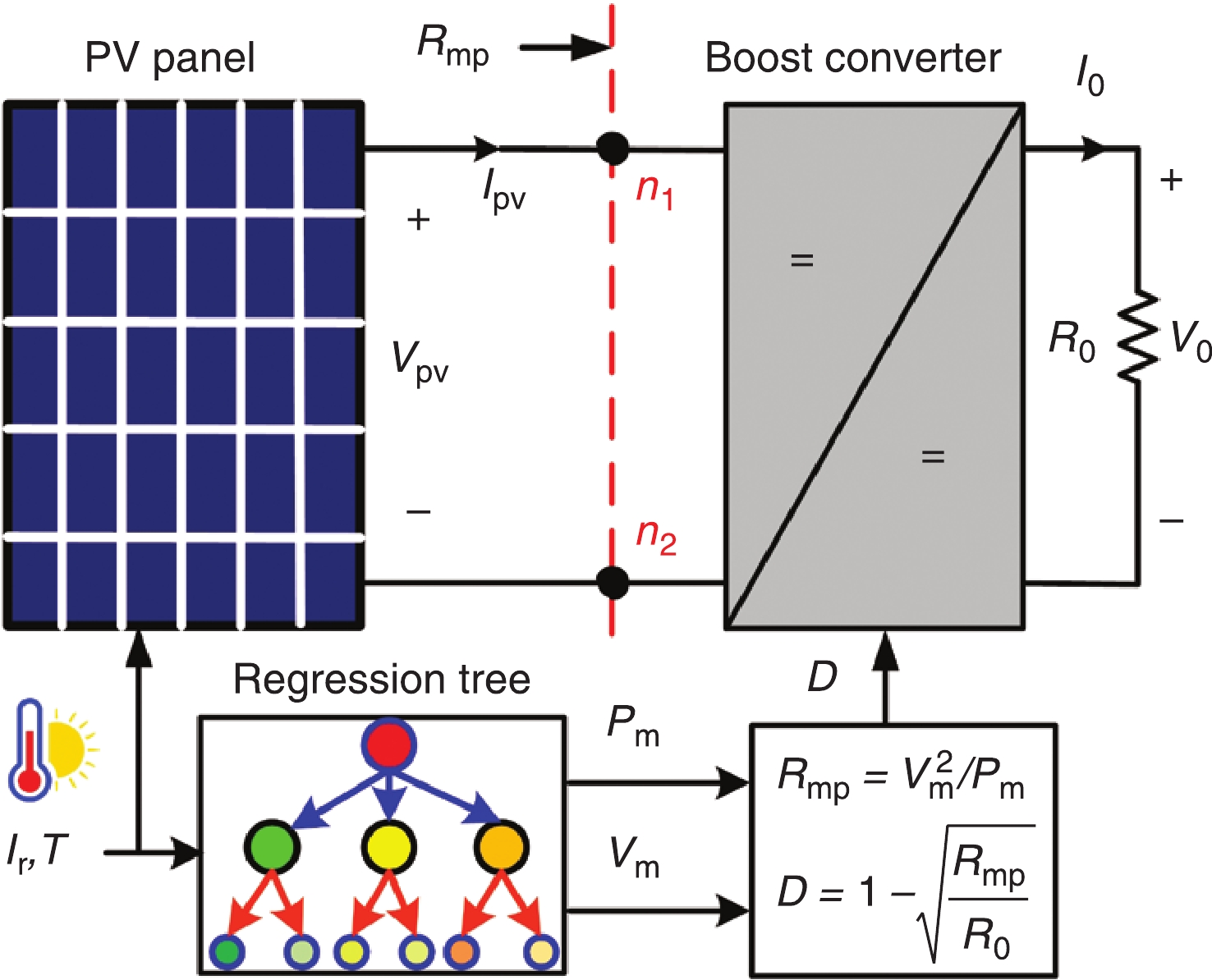
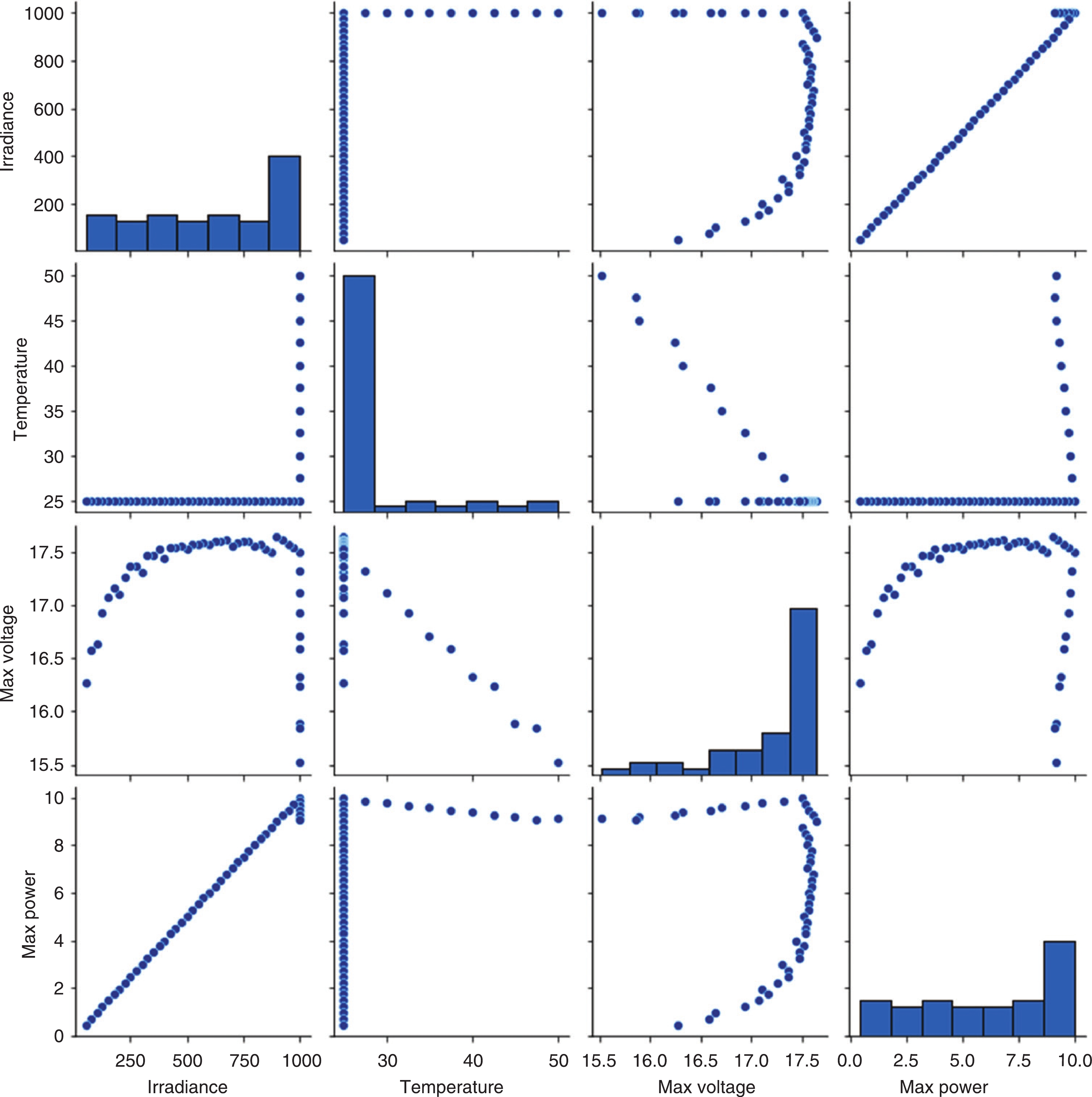
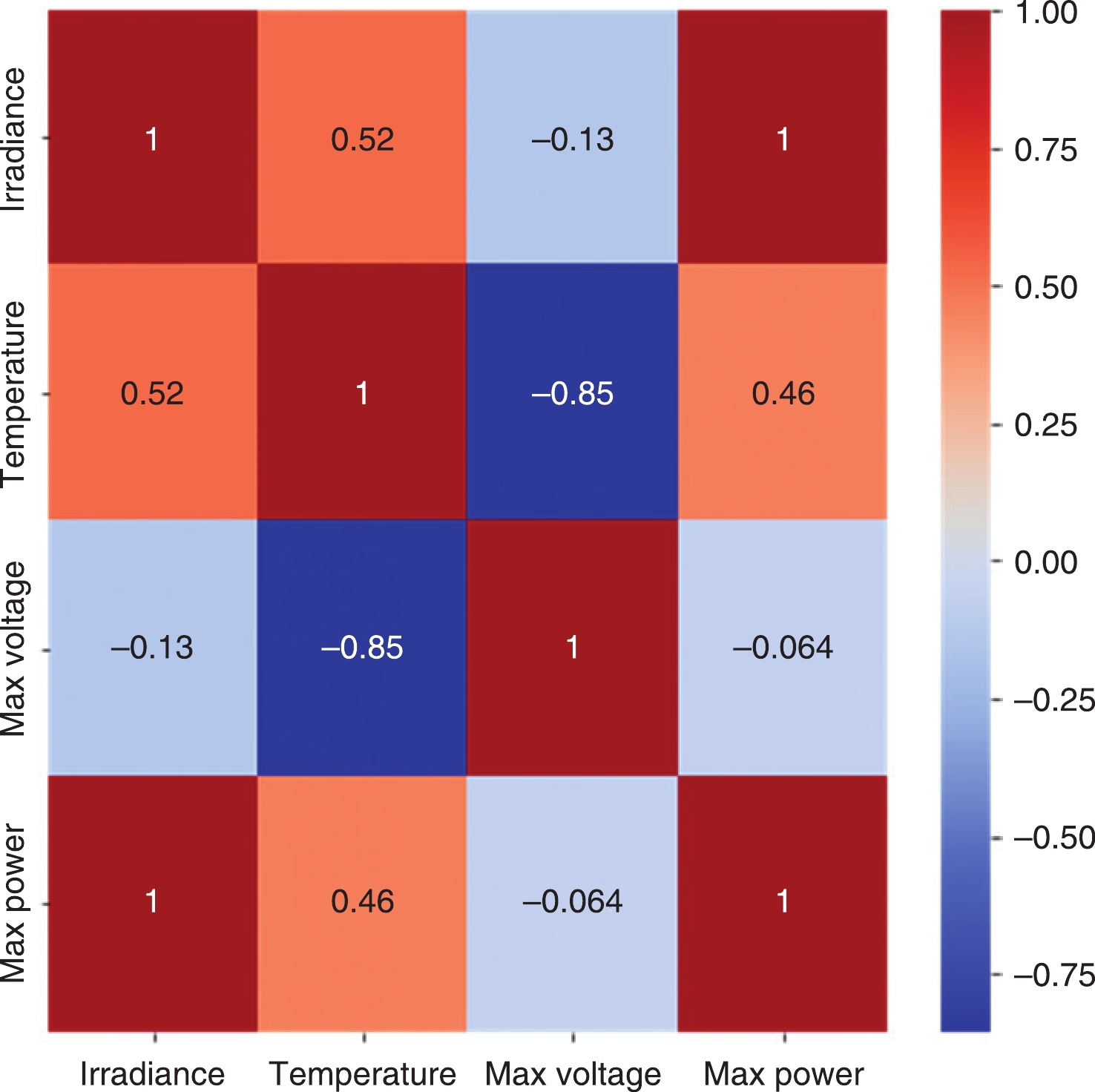
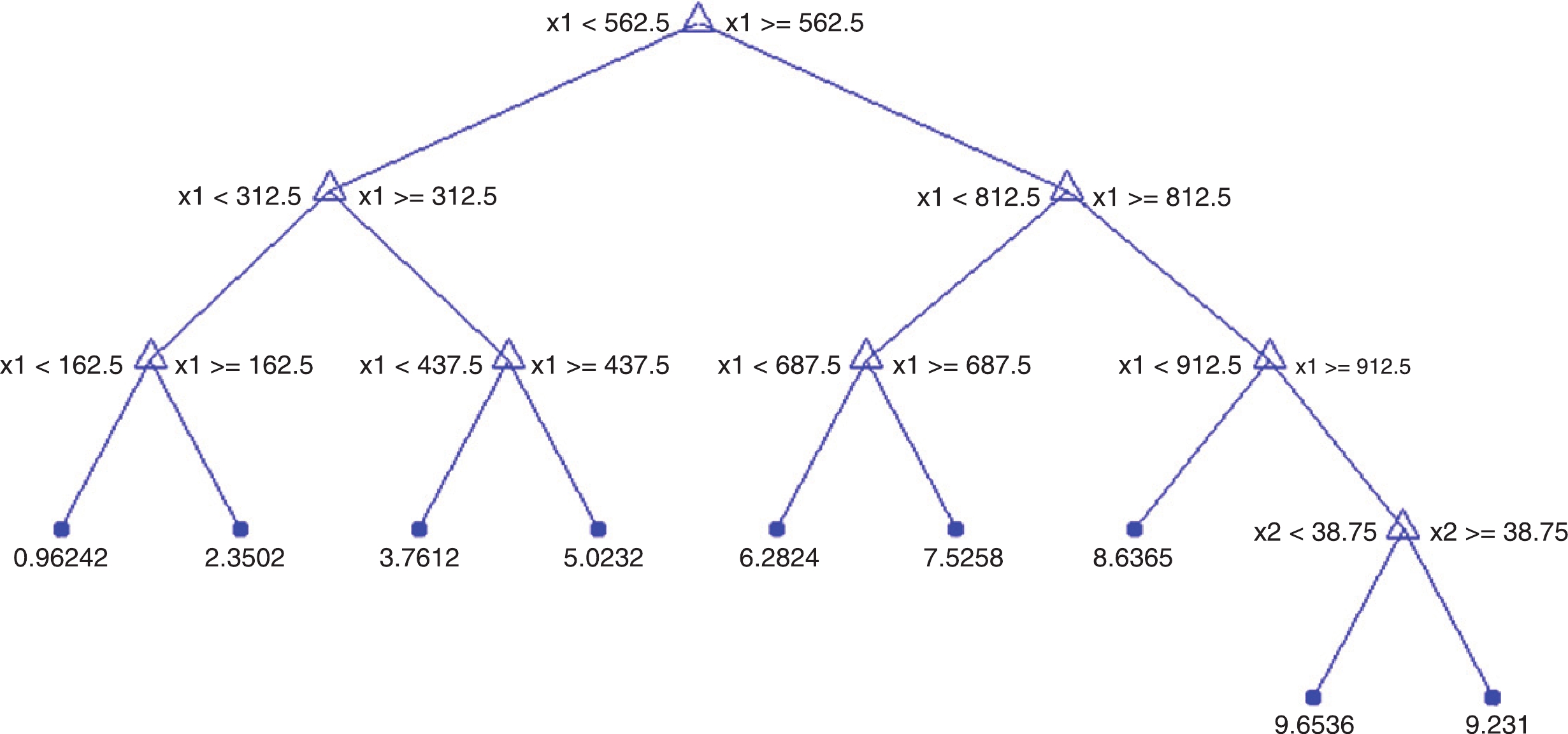
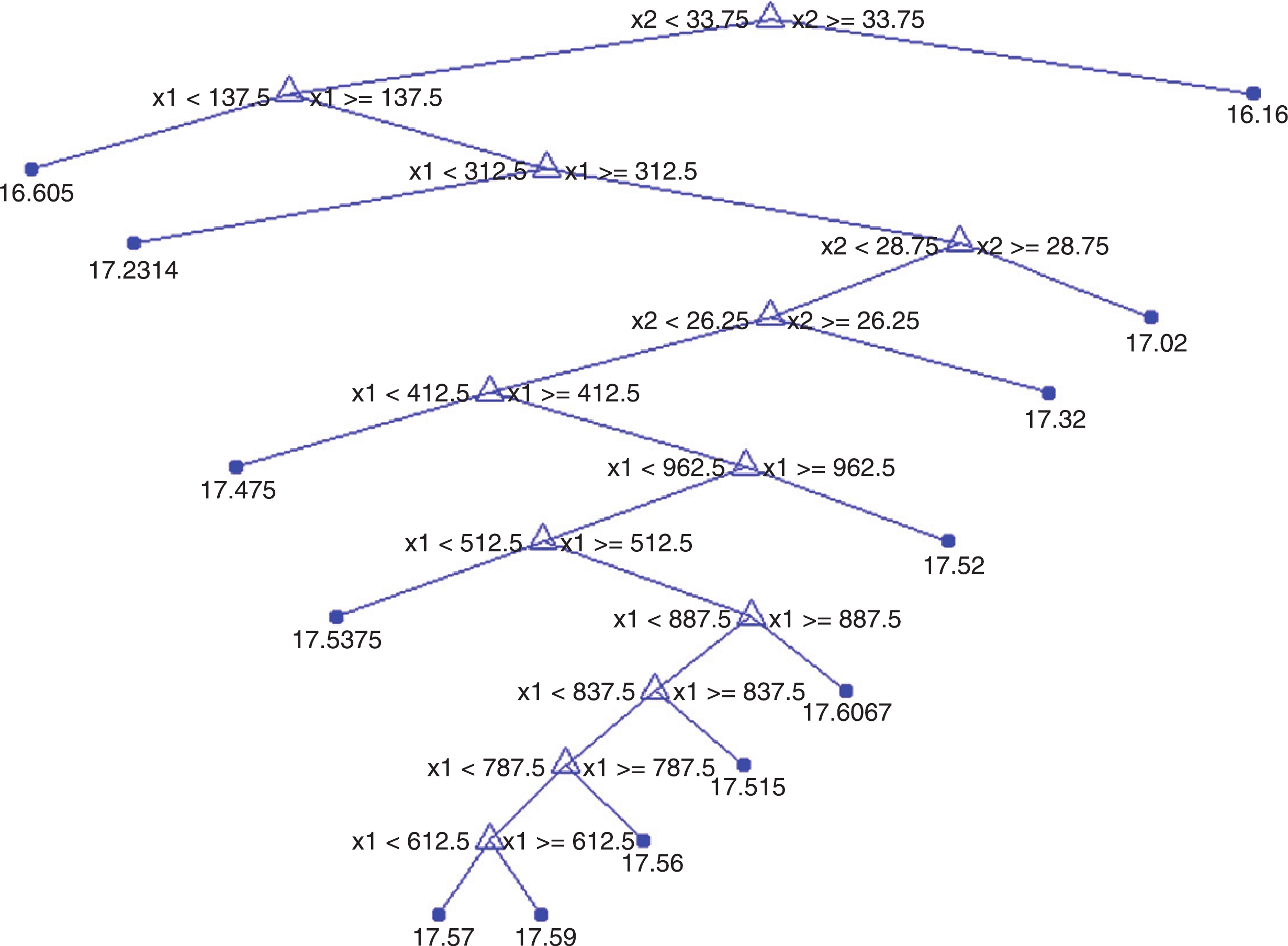
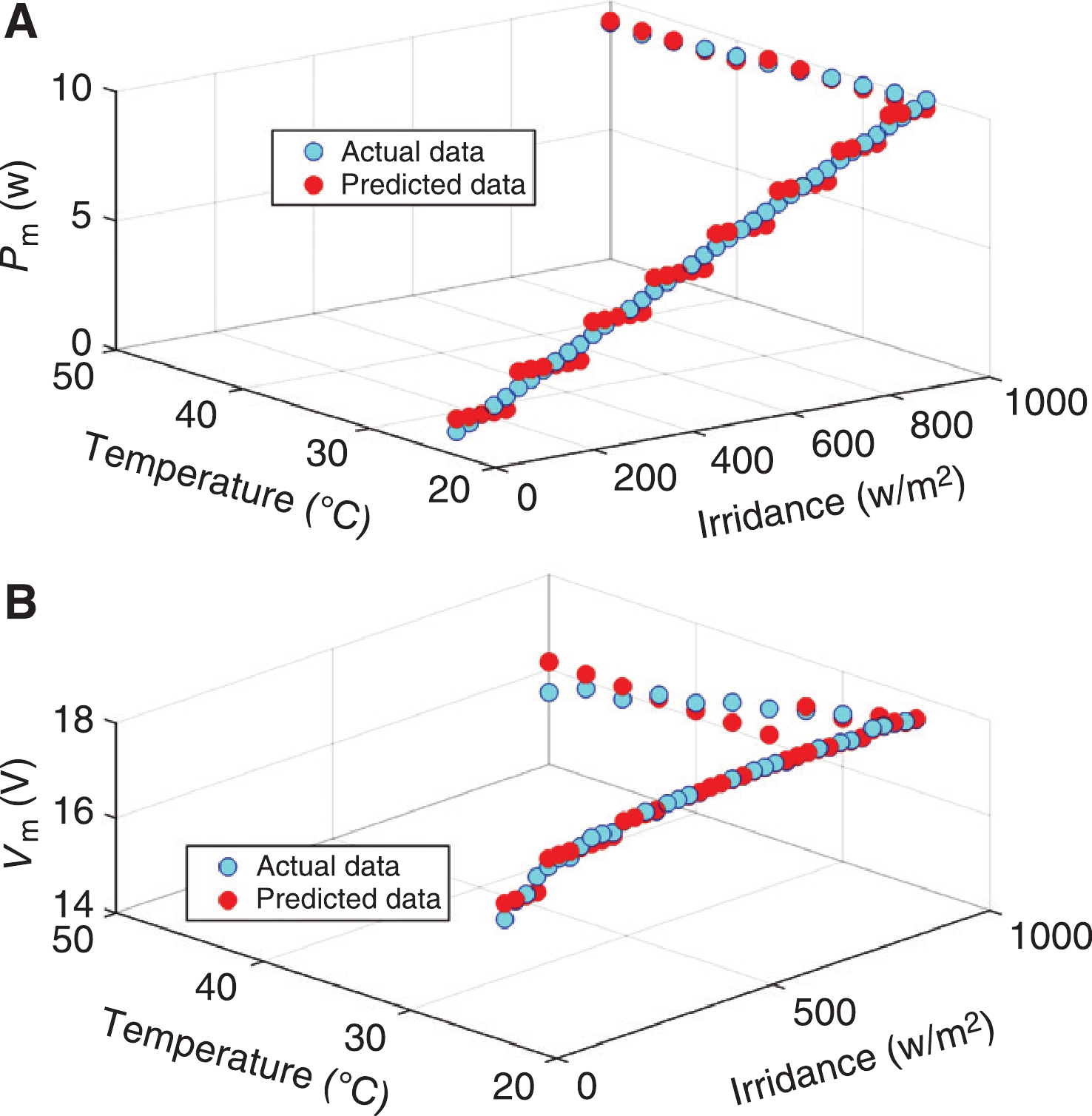
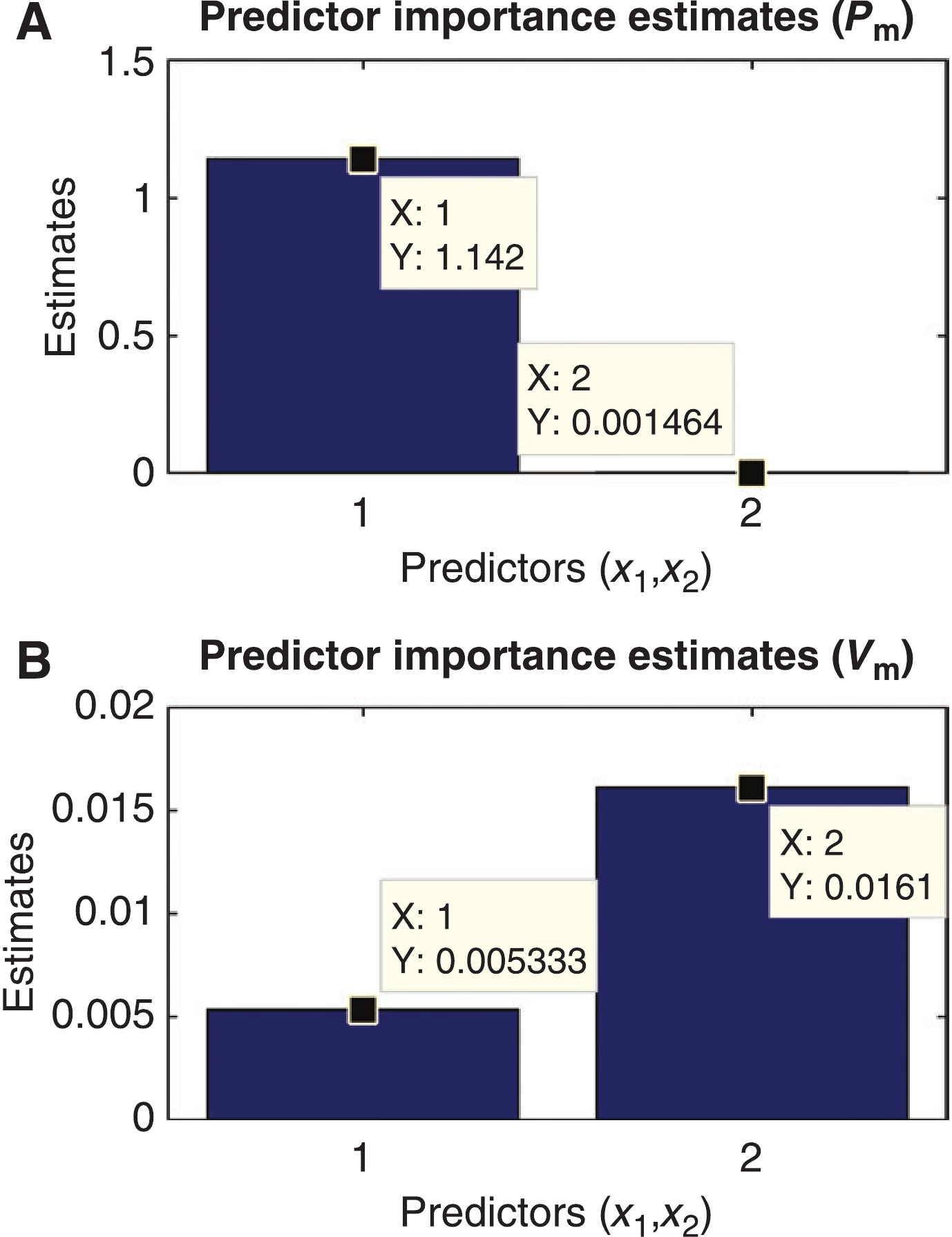
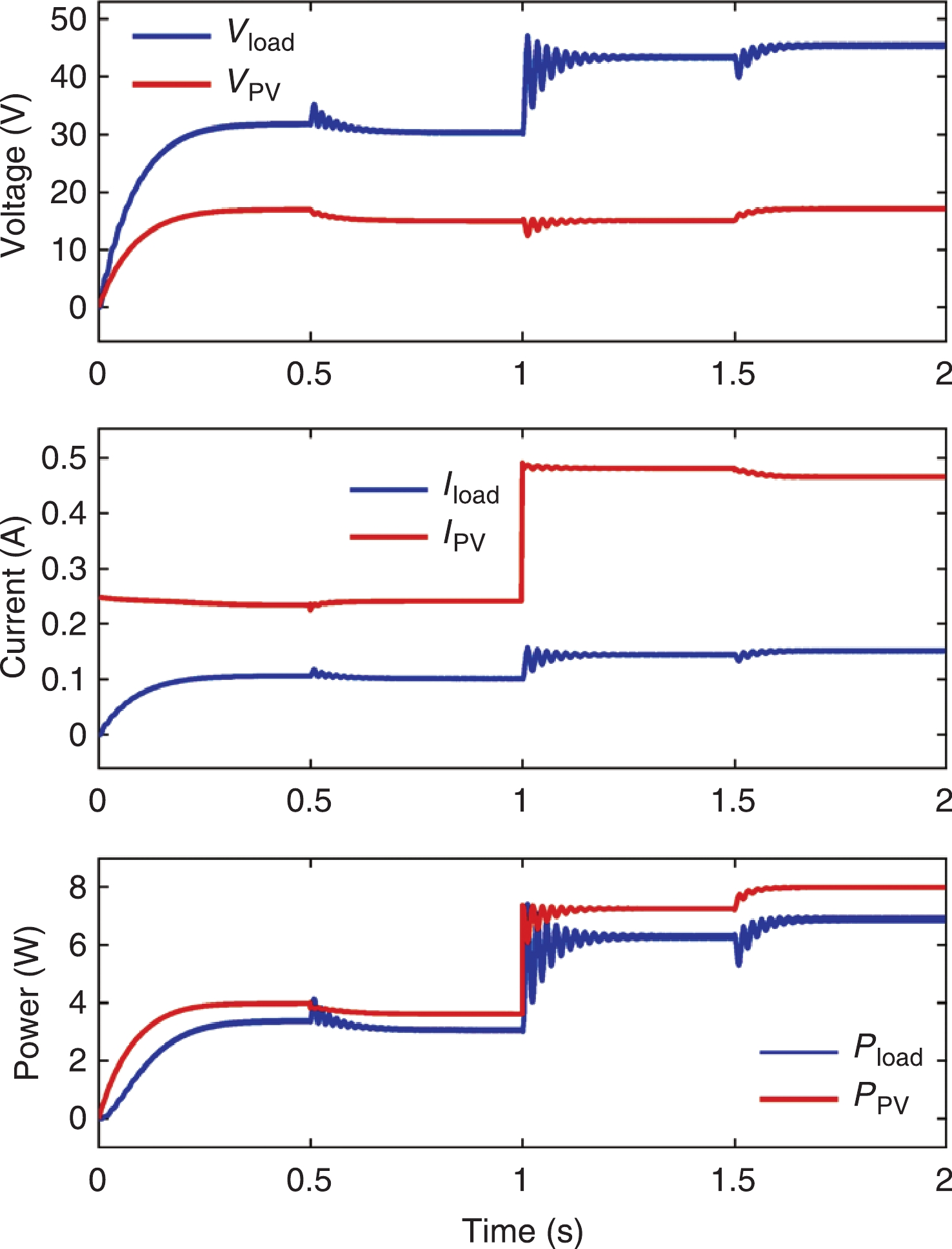
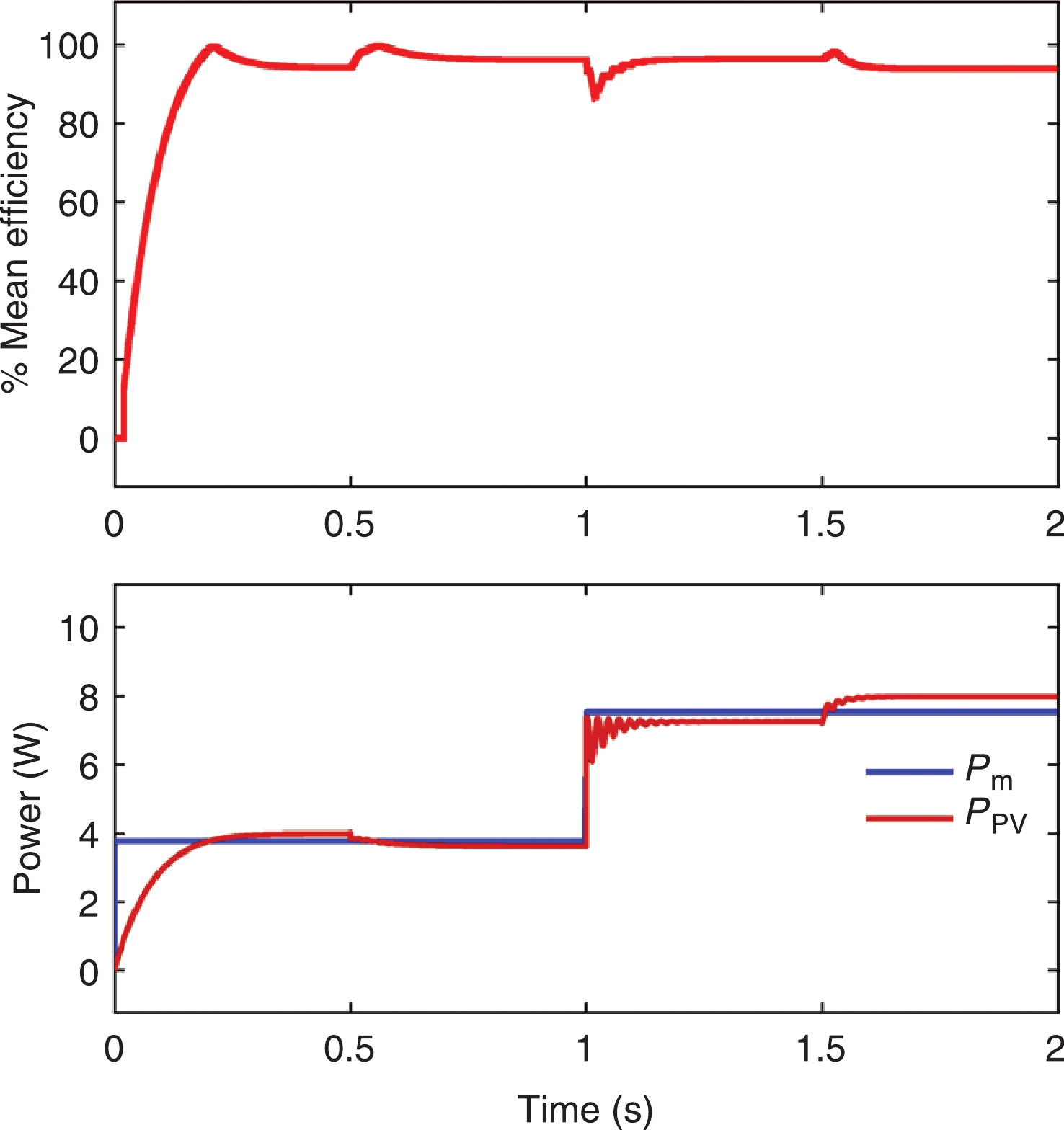
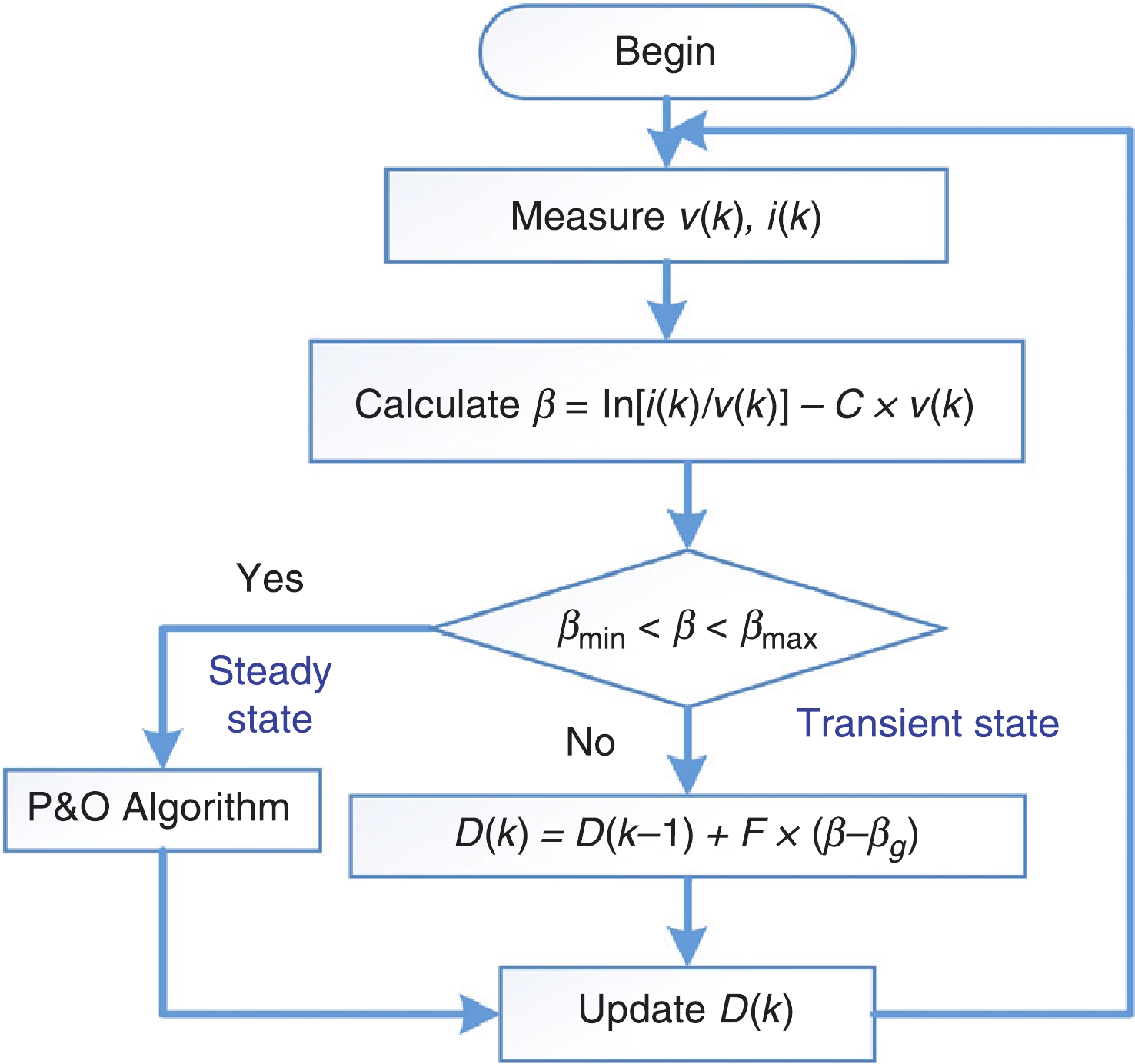
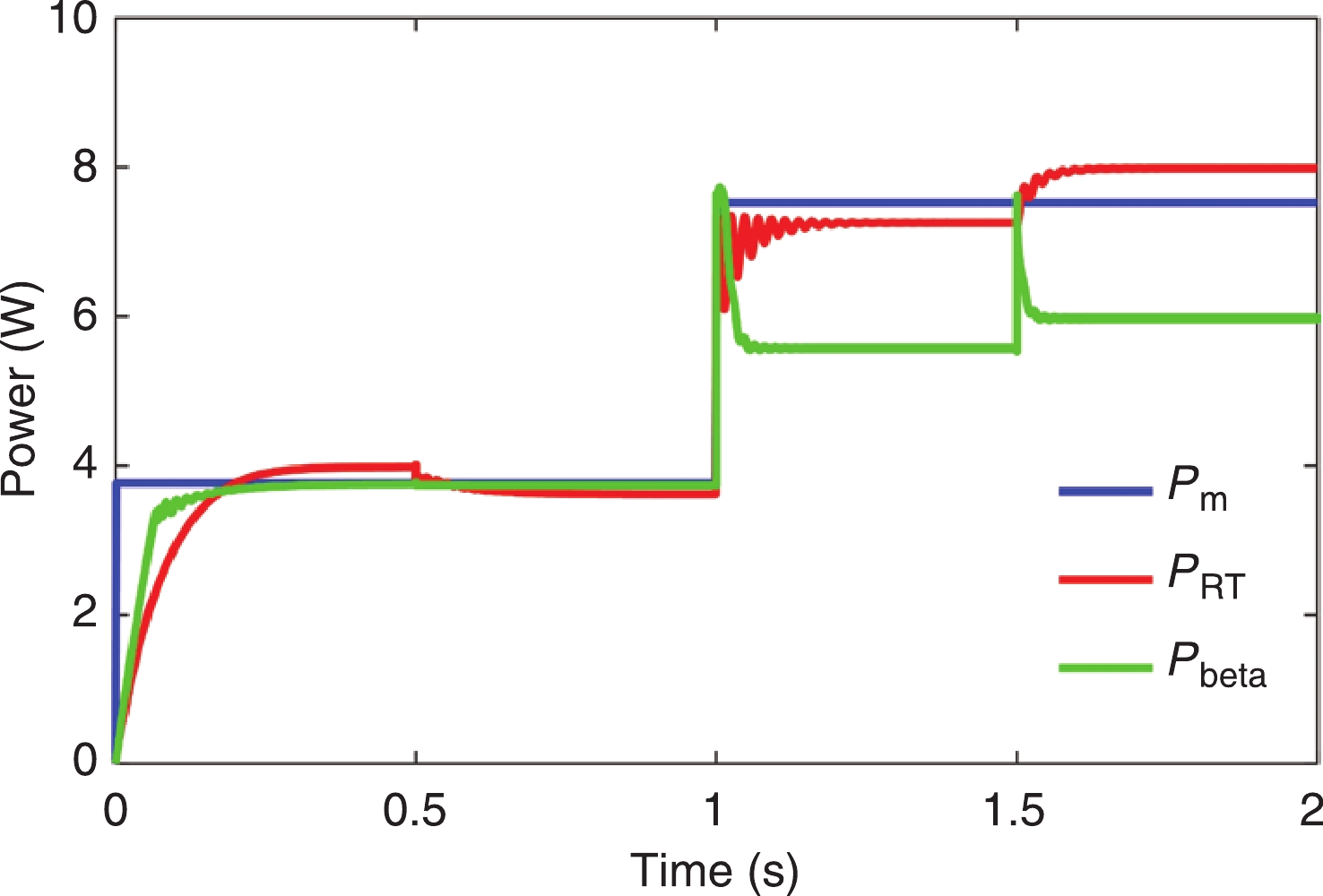
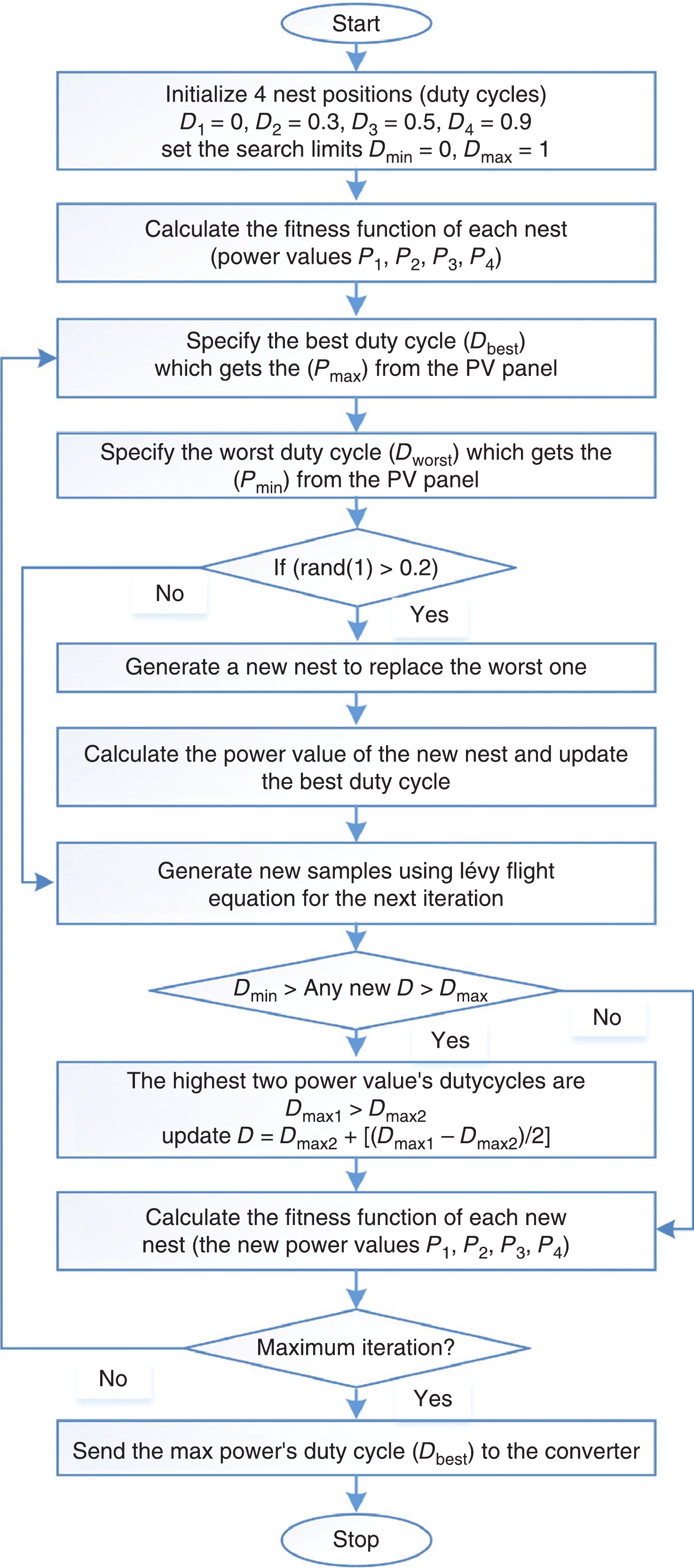
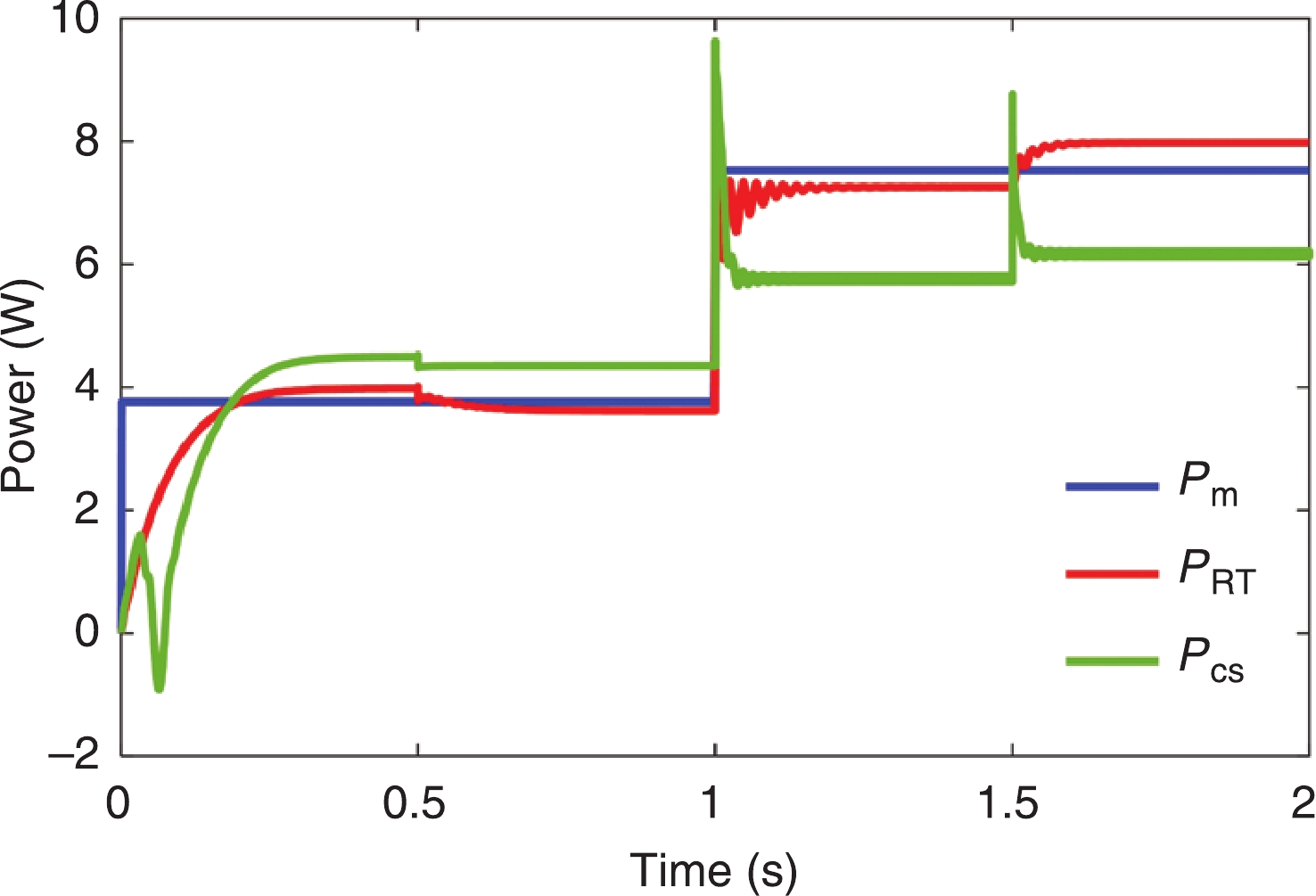
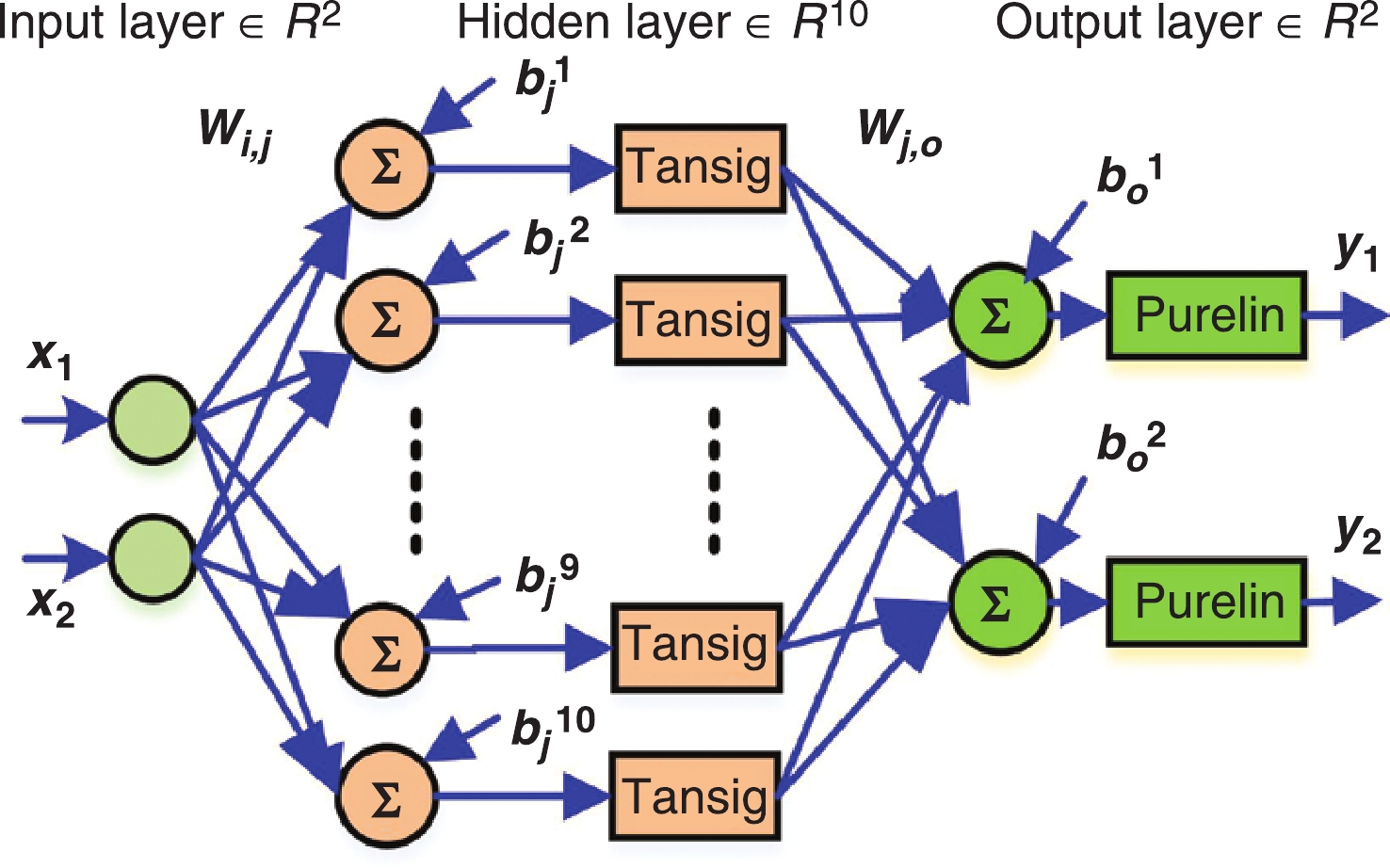
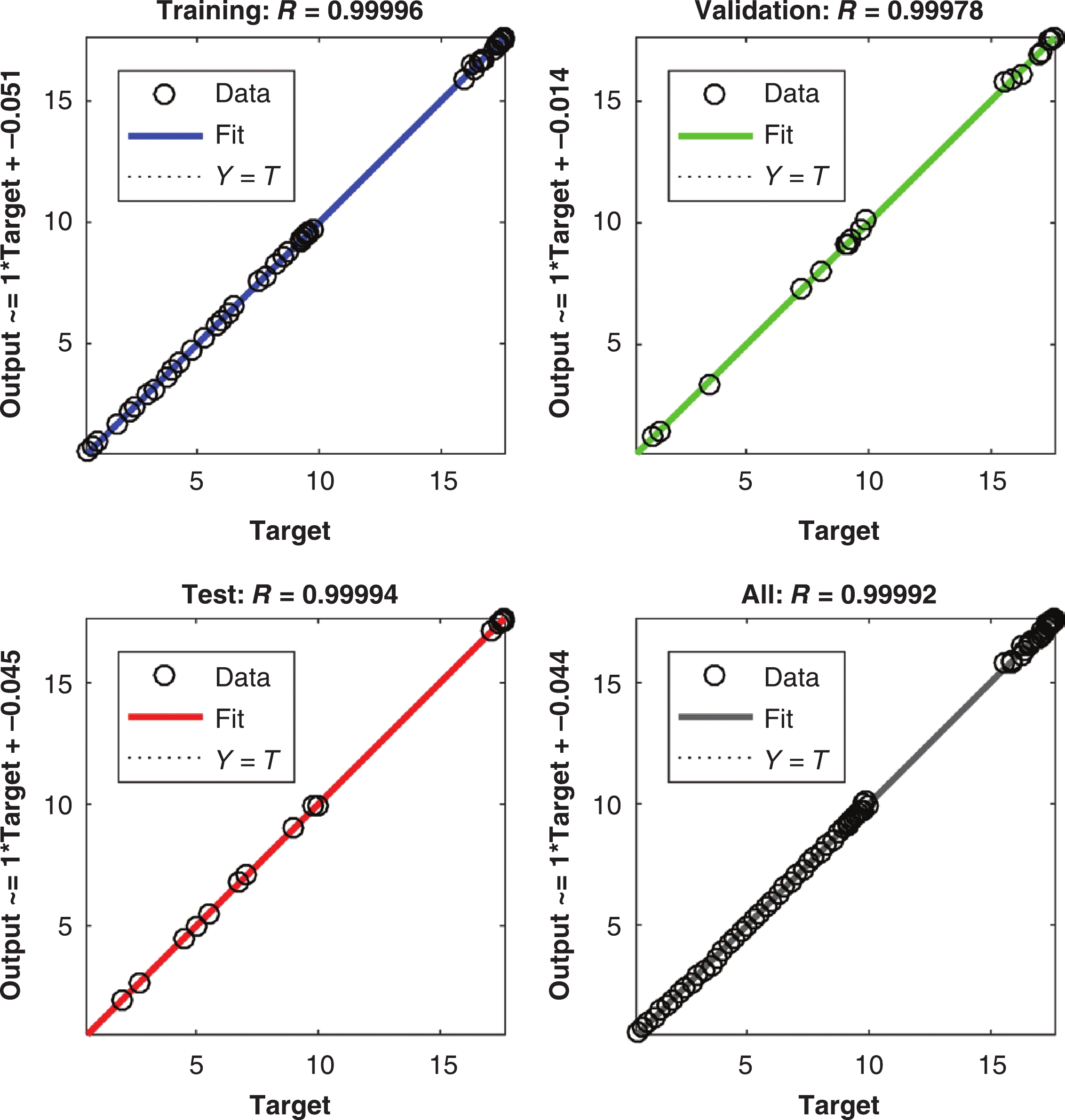
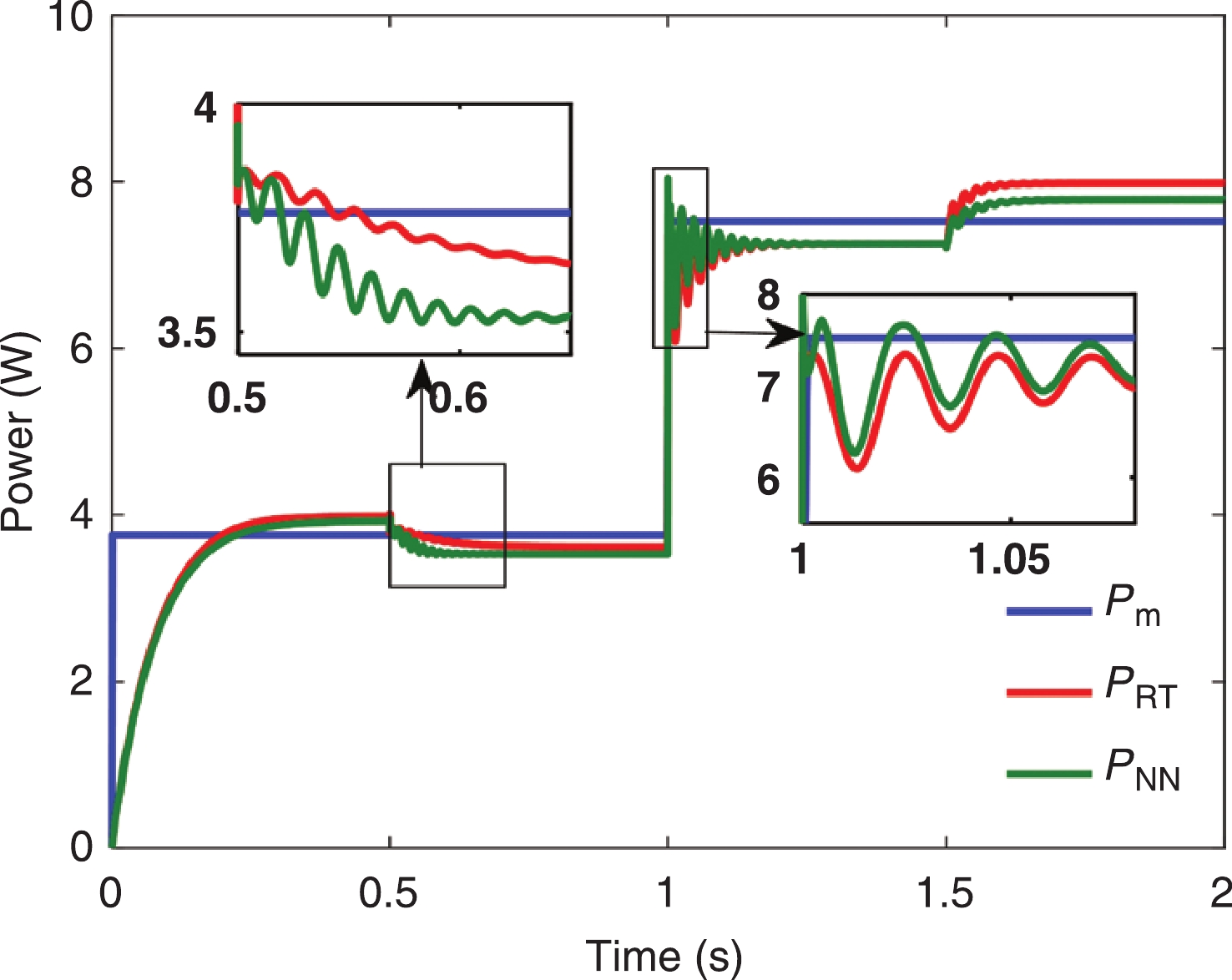
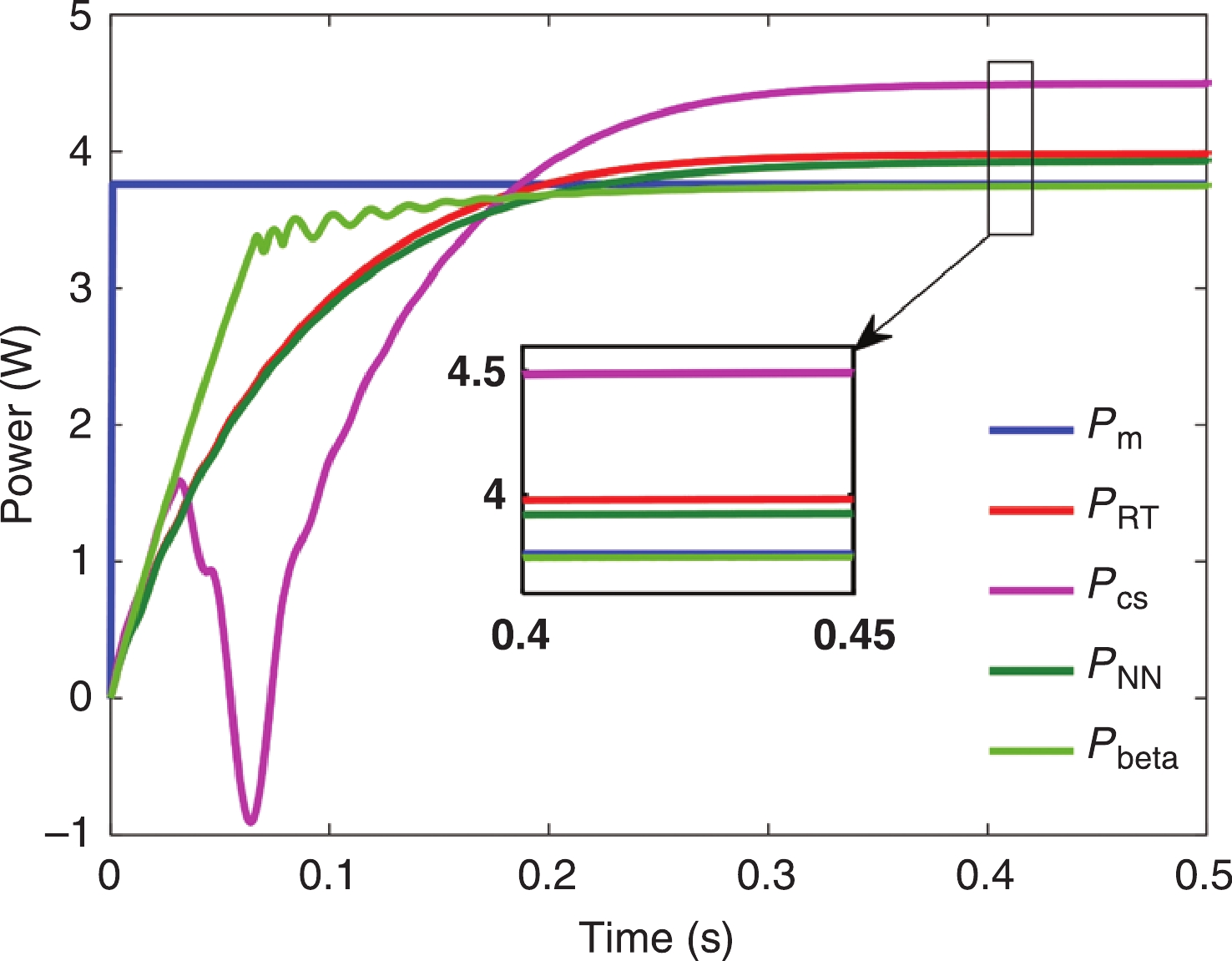
本工作报道了一种机器学习(machine-learning, ML)算法,用于非并网光伏(photovoltaic, PV)系统的最大功率点跟踪(maximum power point tracking, MPPT)。由于天气条件是动态变化的,因此光伏系统的能量产出也是非线性的。由于尚无可对这种非线性数据进行有效处理的专门手段,因此理想的方案是通过机器学习的方法使光伏系统运行于其最大功率点(maximum power point, MPP)处。本文提出了一种基于决策树(decision-tree, DT)回归机器学习算法的策略以确定光伏系统的最大功率点。所需数据来源于光伏组件的技术规格信息,并用于对决策树的训练和测试。这样的算法可以预测出光伏模组在特定日照水平和温度范围内的最大功率和相应电压。通过得到的预测值确定了Boost变换器的占空比。对一块10 W的太阳能电池面板进行了模拟仿真,其在1000 W/m2日照水平和25 ℃温度下的开路电流为0.62 A,开路电压为21.50 V。仿真结果表明,相较于β-MPPT、布谷鸟搜索和人工神经网络等现有算法得到的结果,本文所报道的方法可使光伏面板在决策树预测出的最大功率点下运行。即使是在日照水平和温度不断变化的情况下,根据这一新算法实现的光伏系统效率还是提升了>93.93%。
本工作报道了一种机器学习(machine-learning, ML)算法,用于非并网光伏(photovoltaic, PV)系统的最大功率点跟踪(maximum power point tracking, MPPT)。由于天气条件是动态变化的,因此光伏系统的能量产出也是非线性的。由于尚无可对这种非线性数据进行有效处理的专门手段,因此理想的方案是通过机器学习的方法使光伏系统运行于其最大功率点(maximum power point, MPP)处。本文提出了一种基于决策树(decision-tree, DT)回归机器学习算法的策略以确定光伏系统的最大功率点。所需数据来源于光伏组件的技术规格信息,并用于对决策树的训练和测试。这样的算法可以预测出光伏模组在特定日照水平和温度范围内的最大功率和相应电压。通过得到的预测值确定了Boost变换器的占空比。对一块10 W的太阳能电池面板进行了模拟仿真,其在1000 W/m2日照水平和25 ℃温度下的开路电流为0.62 A,开路电压为21.50 V。仿真结果表明,相较于β-MPPT、布谷鸟搜索和人工神经网络等现有算法得到的结果,本文所报道的方法可使光伏面板在决策树预测出的最大功率点下运行。即使是在日照水平和温度不断变化的情况下,根据这一新算法实现的光伏系统效率还是提升了>93.93%。


2022, 6(5): 836-847.
doi: 10.1093/ce/zkac039
摘要:
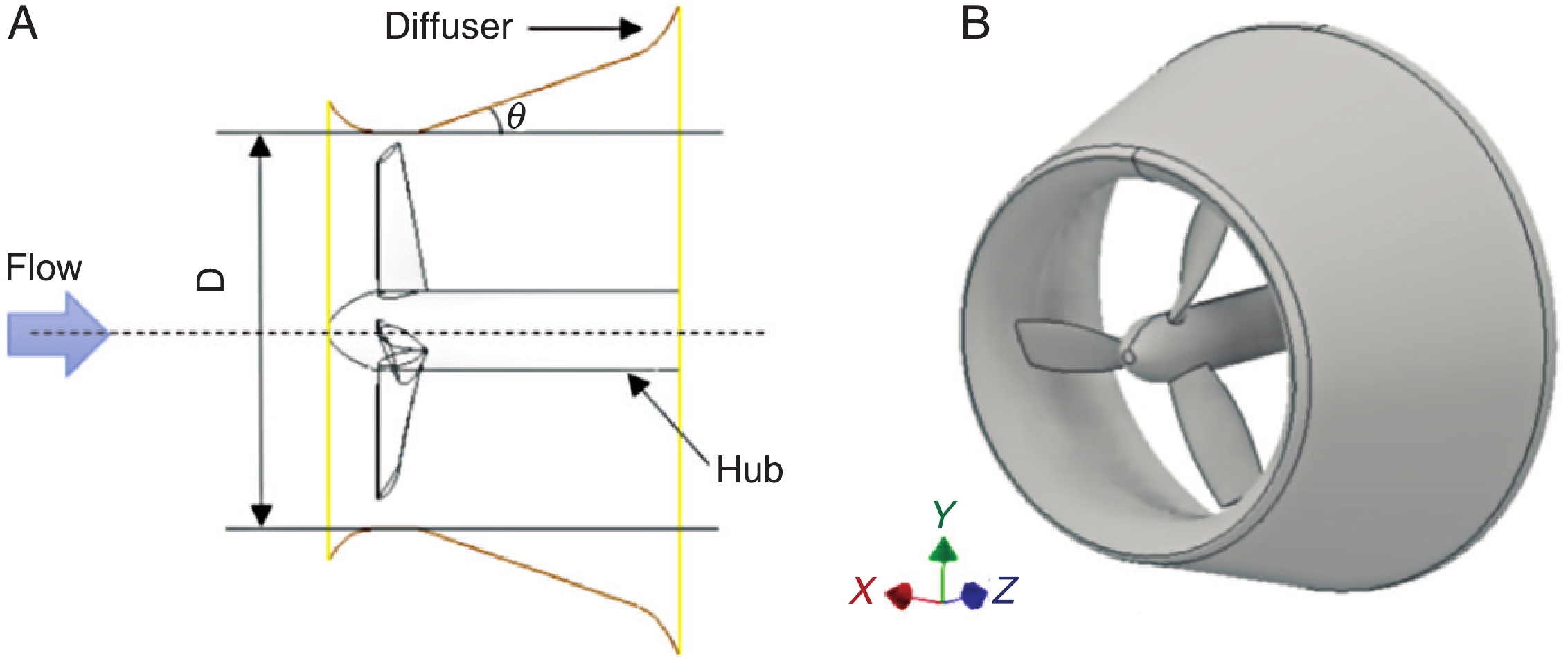
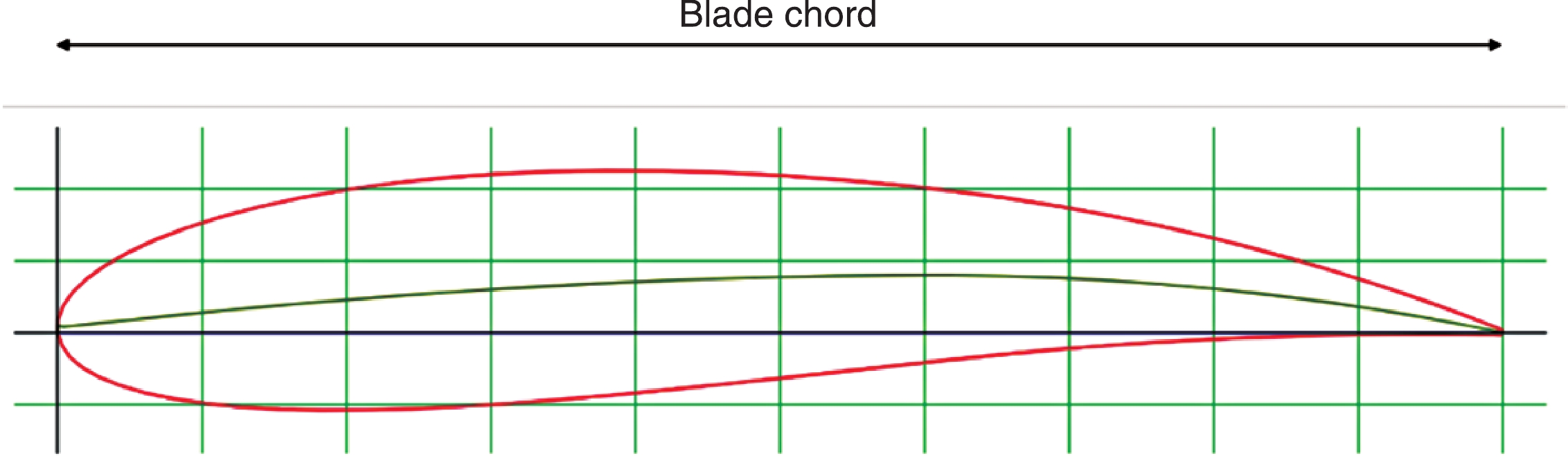
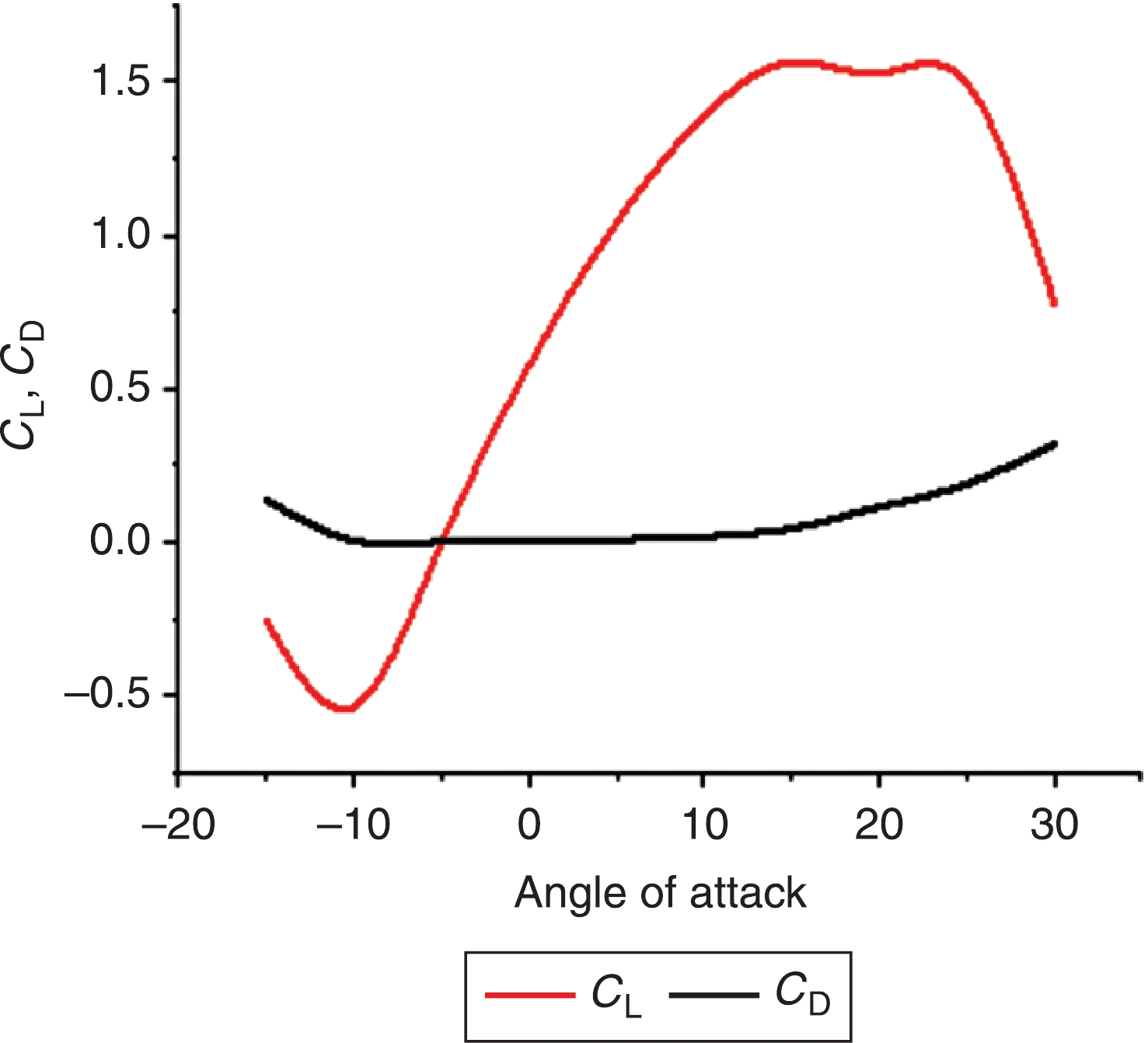
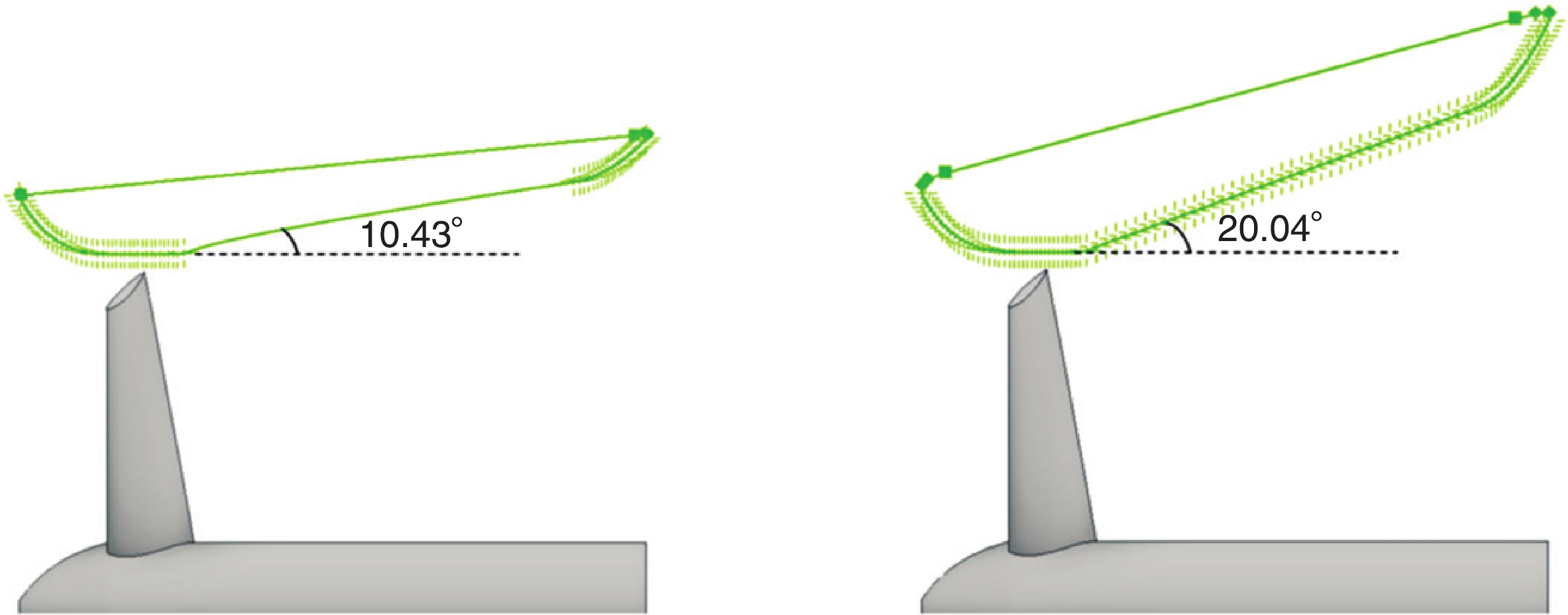
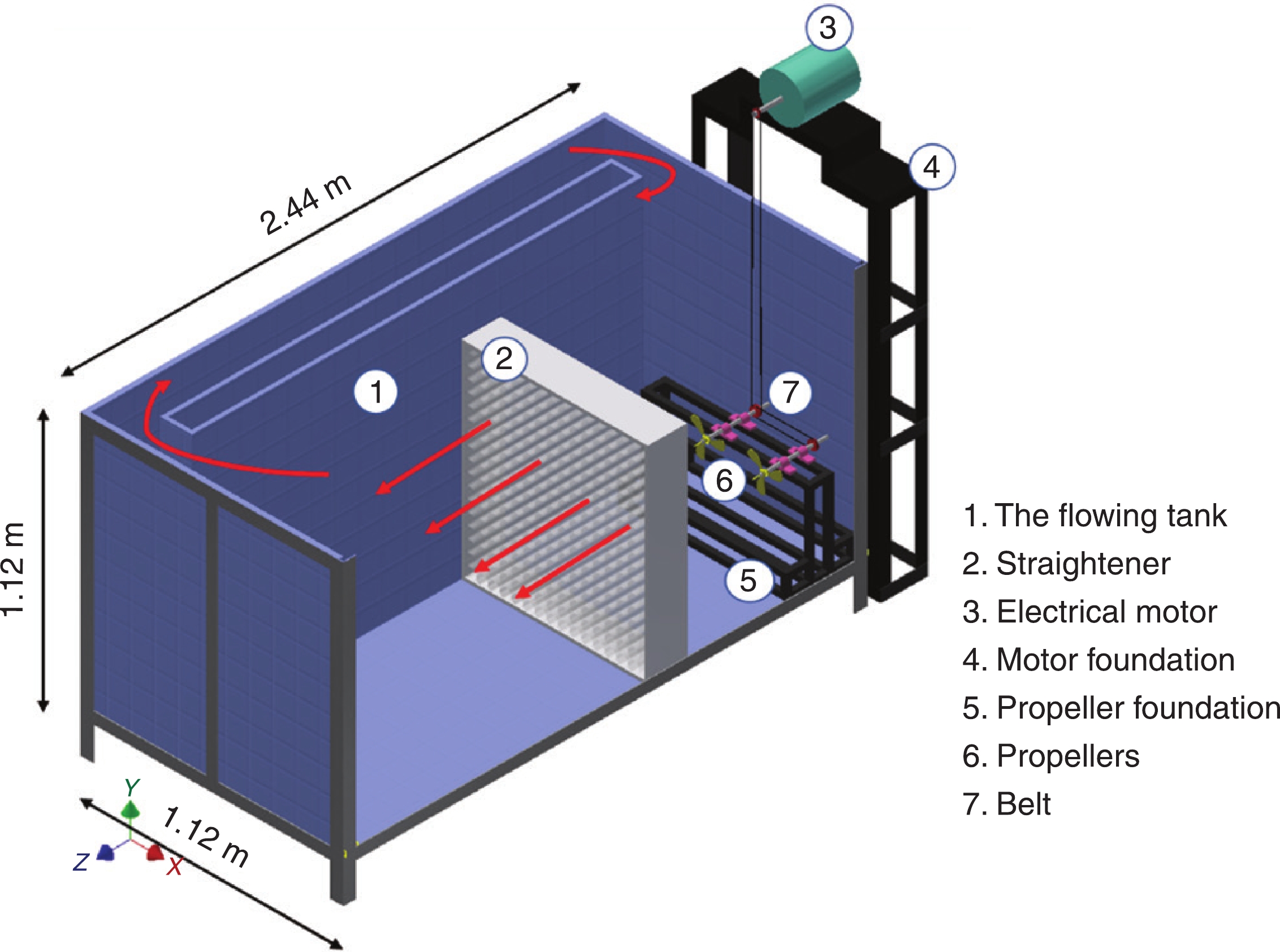
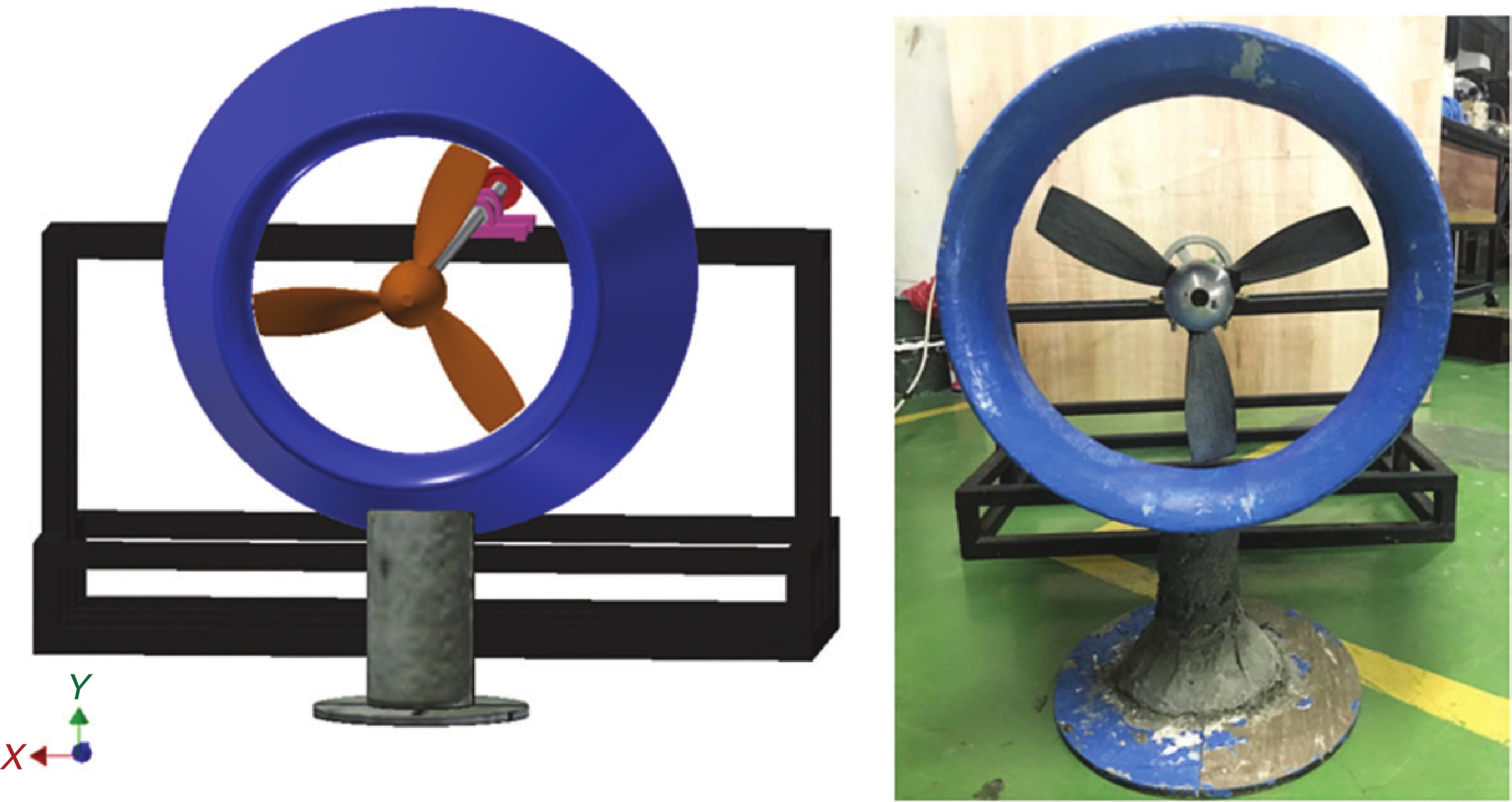
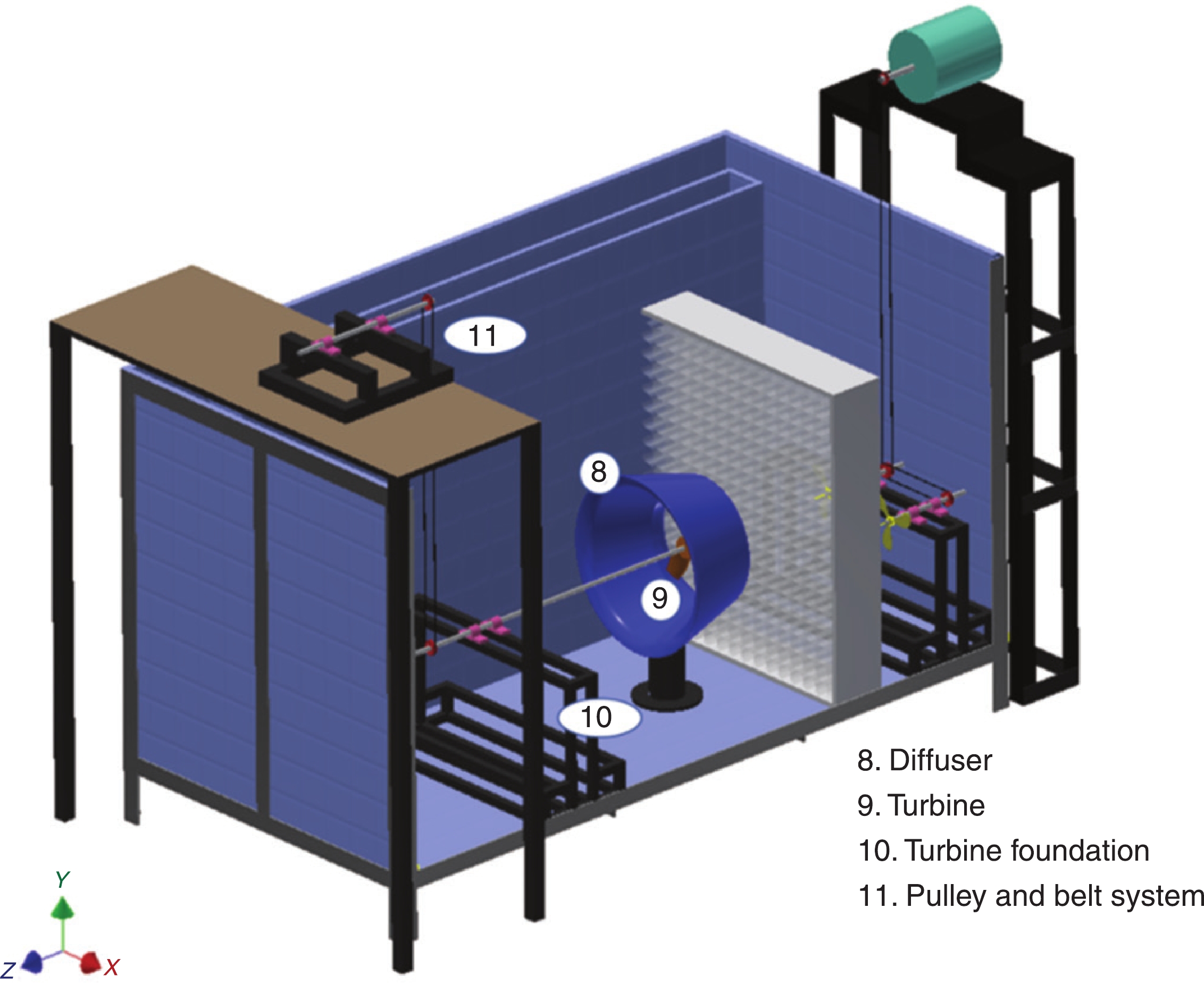
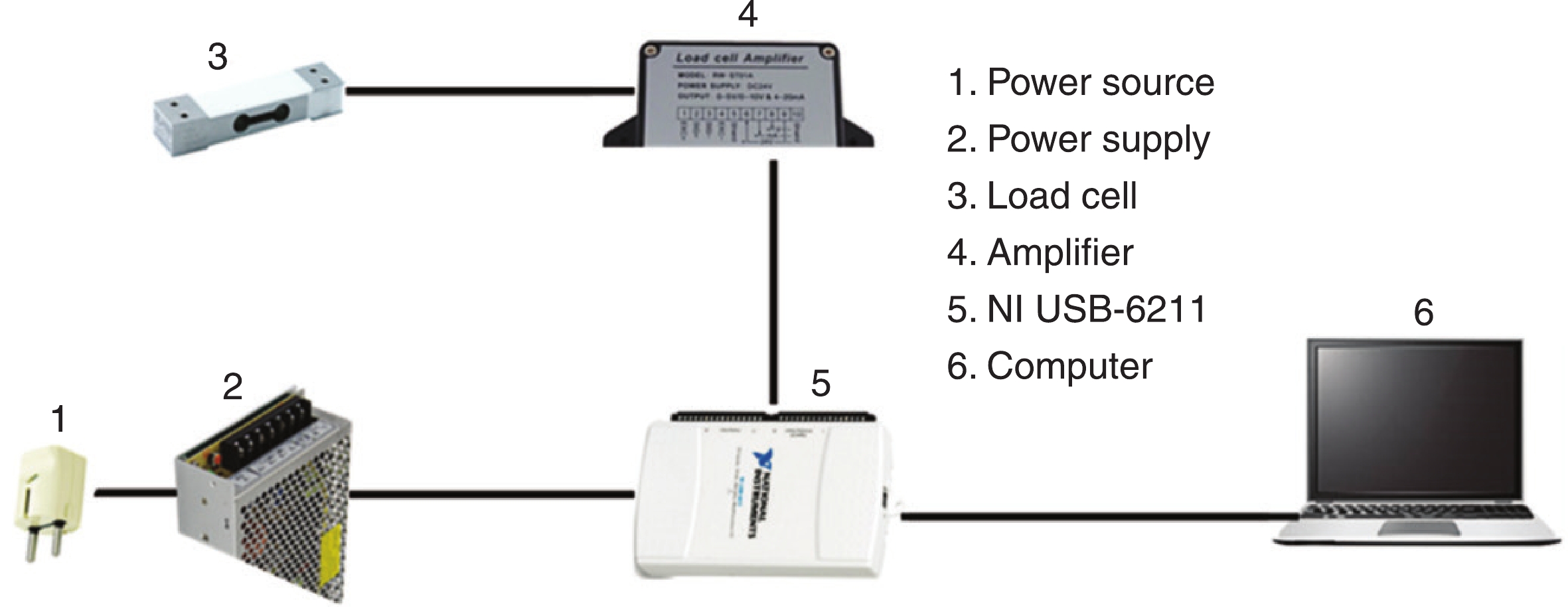
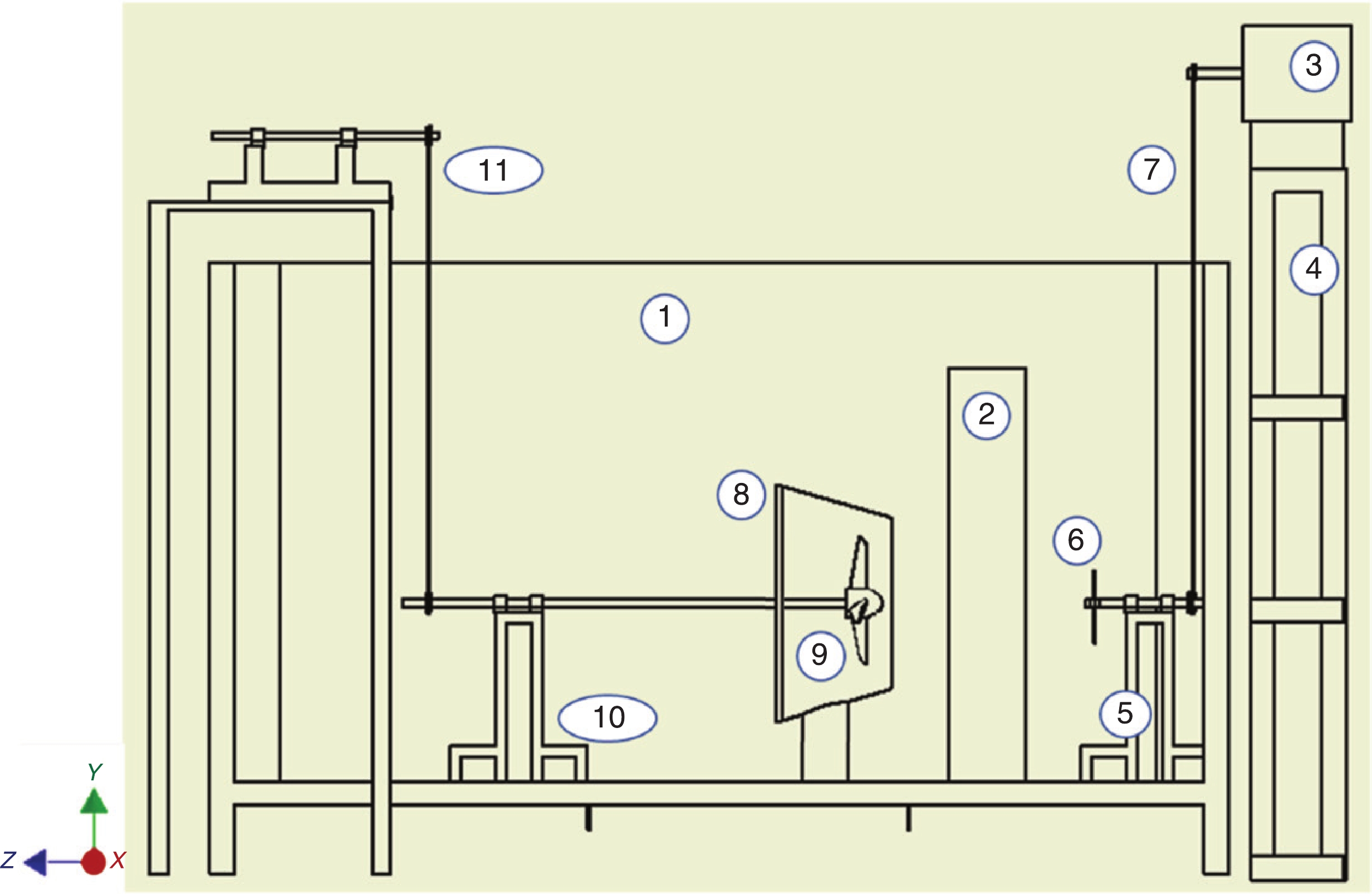
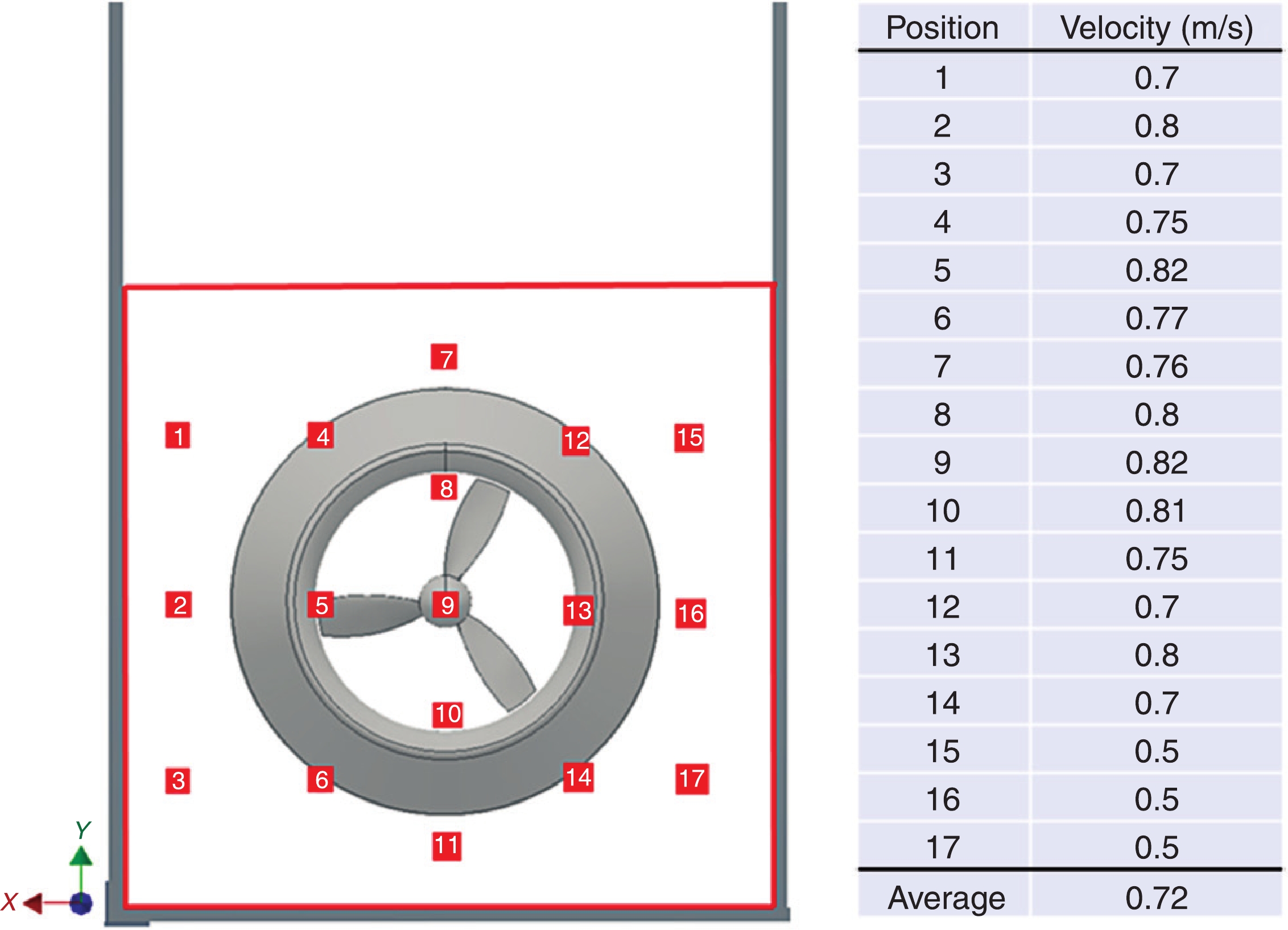
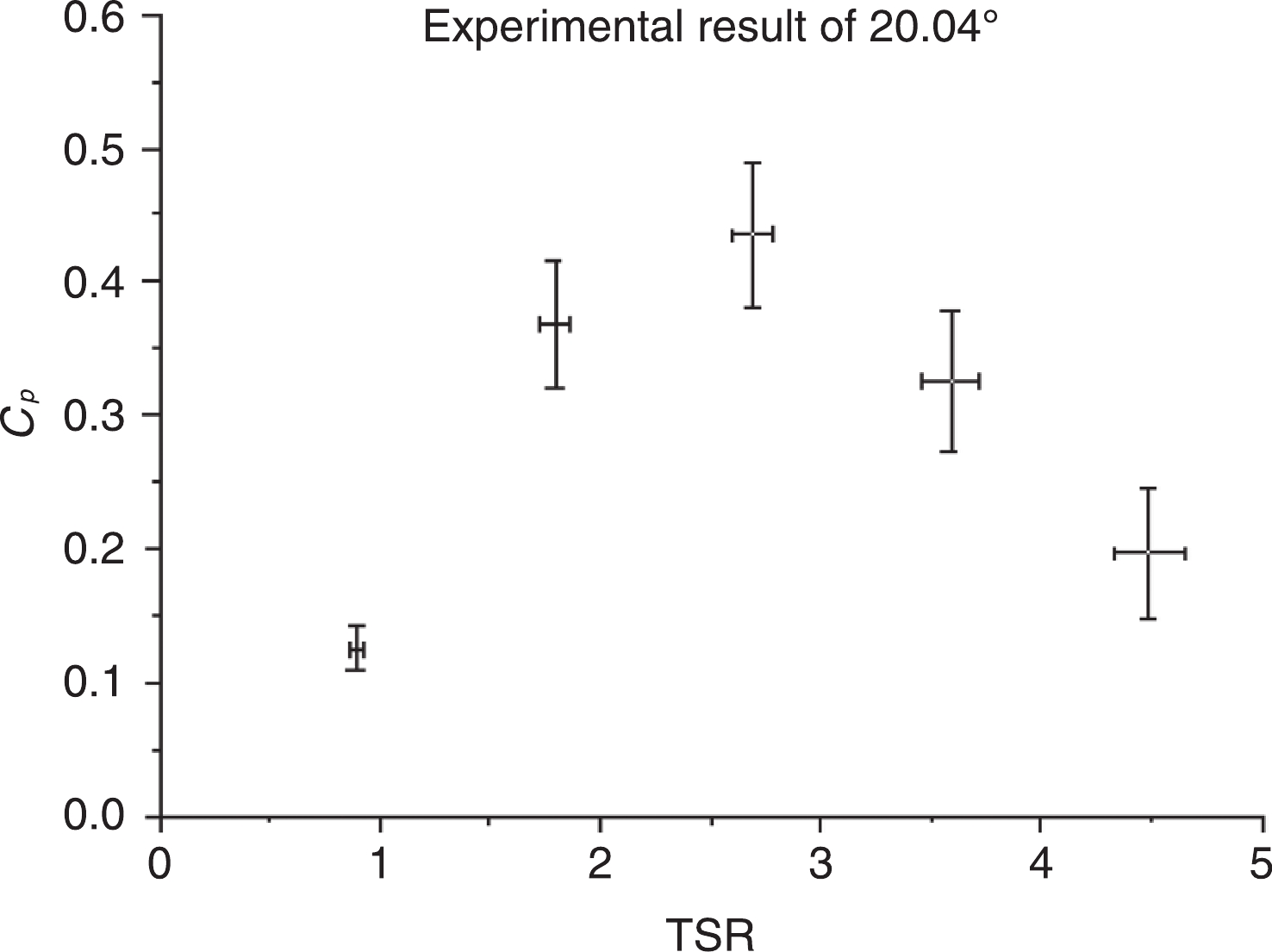
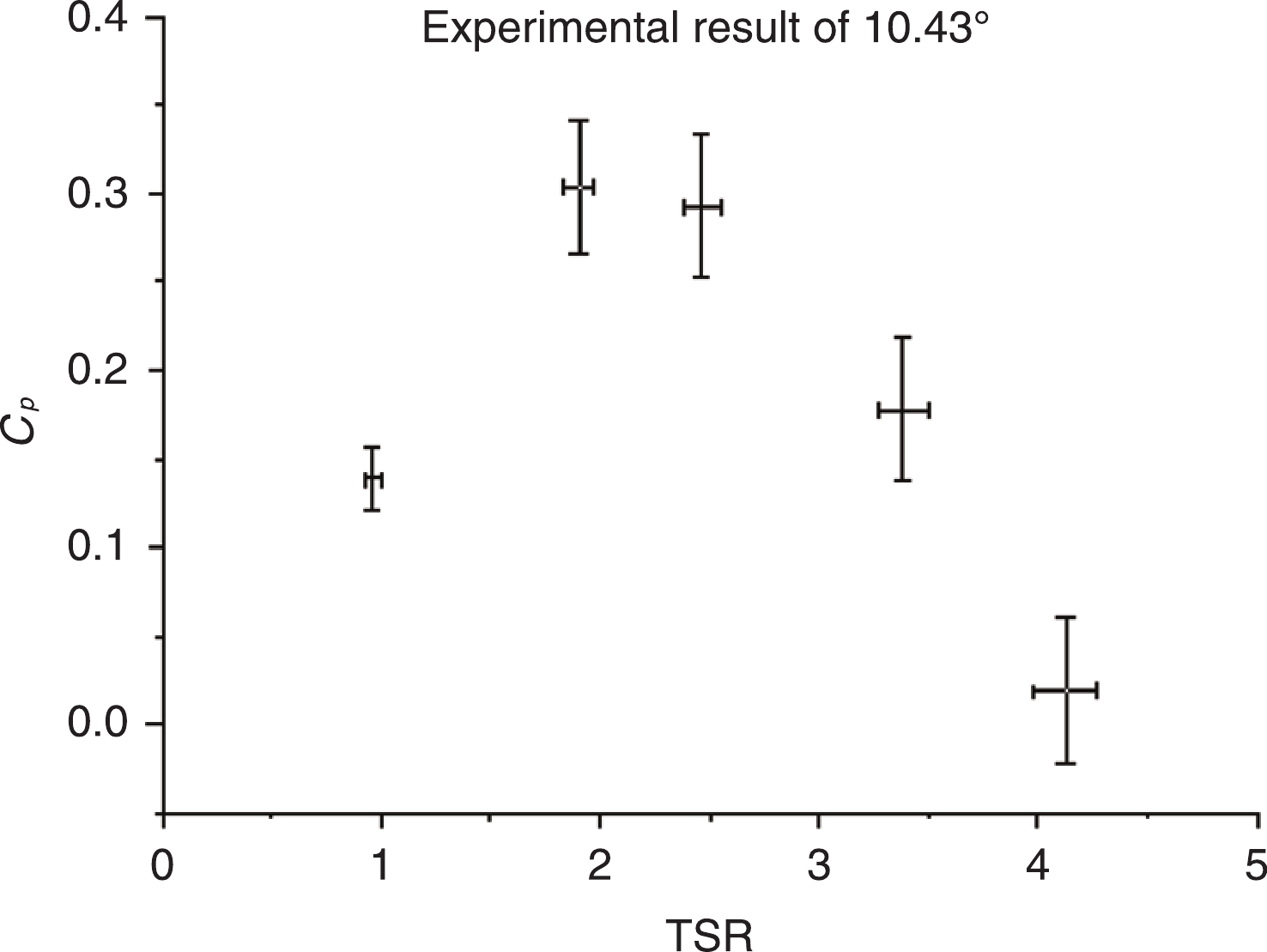
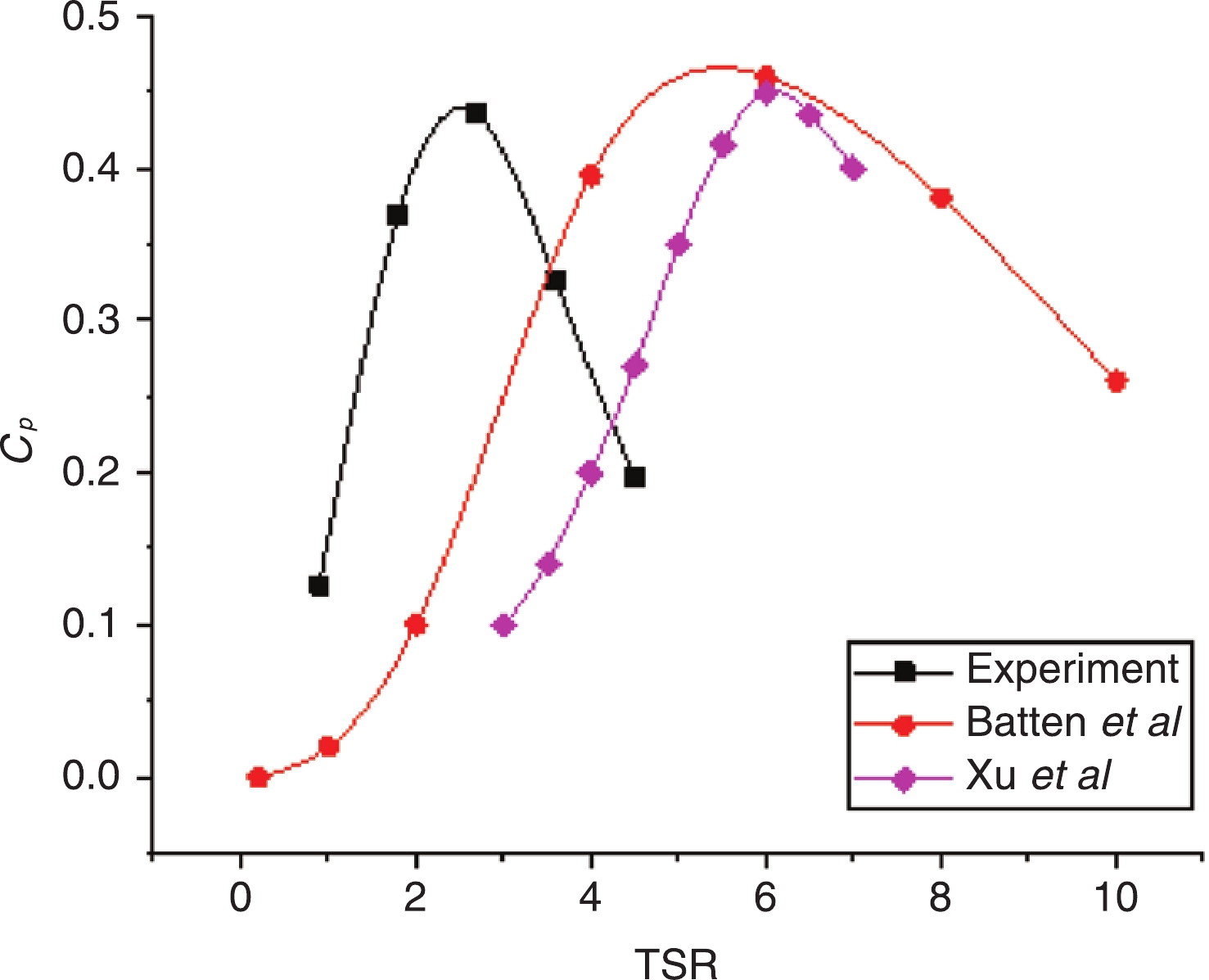
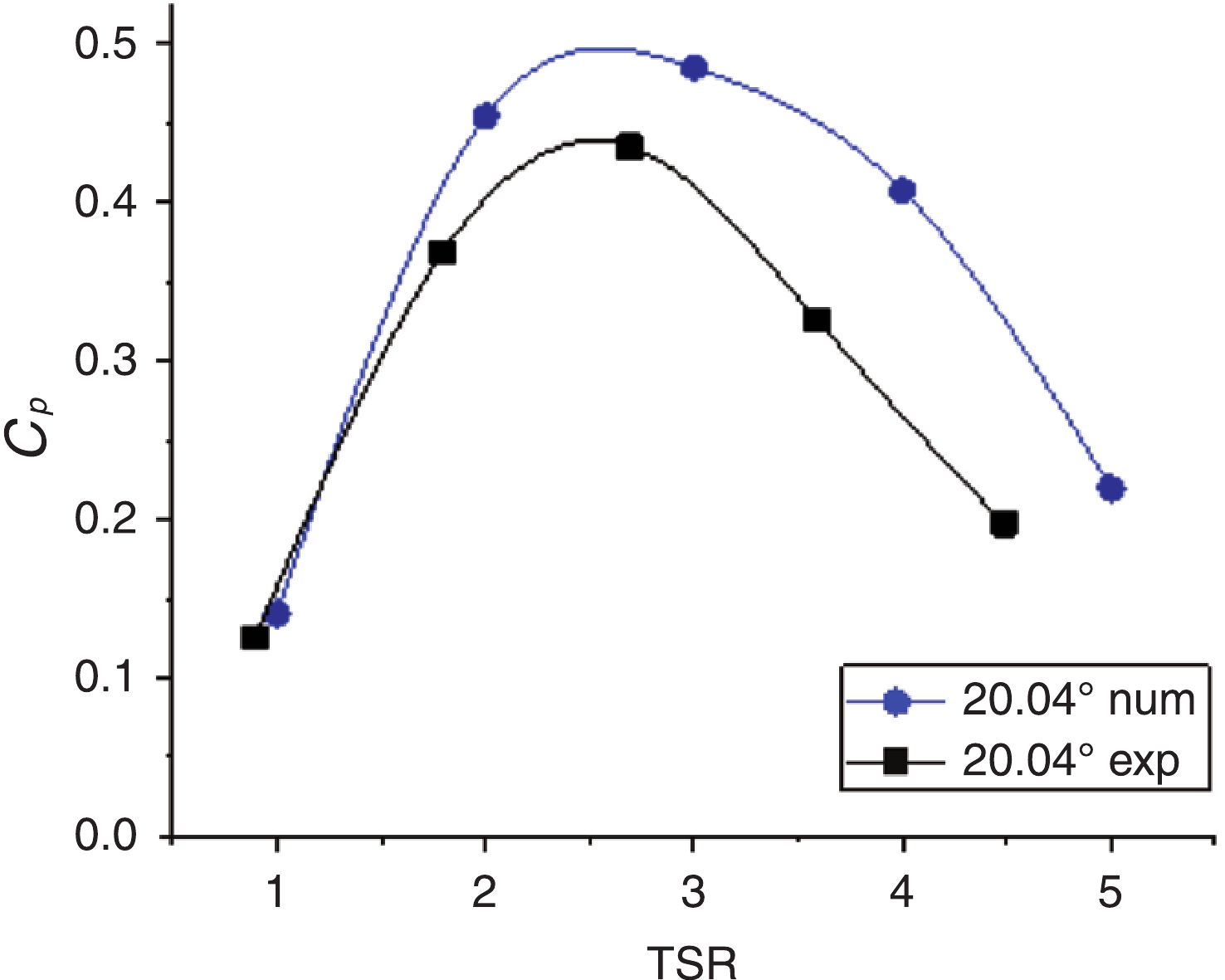
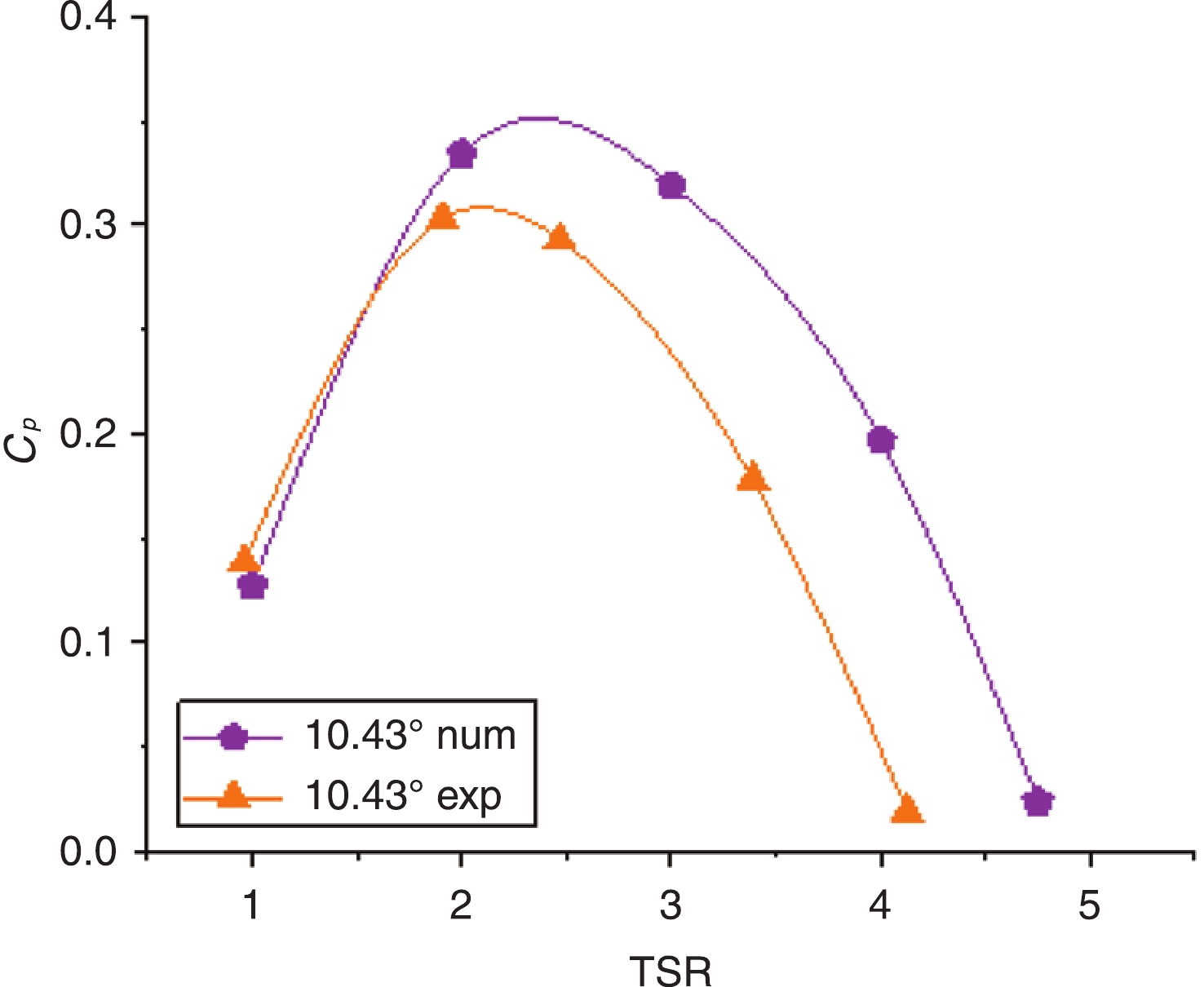
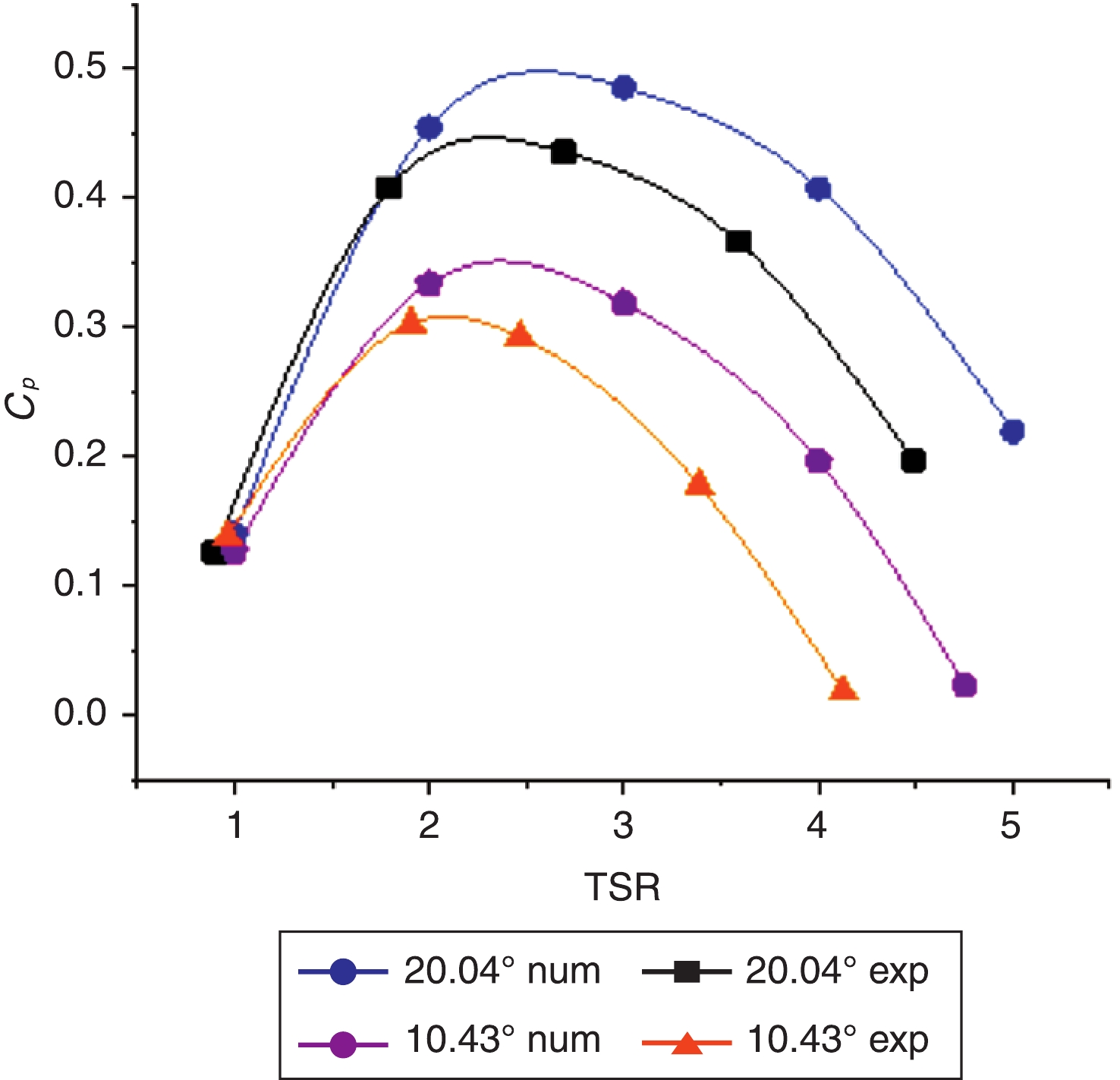
洋流能是一种可靠的能源,有着广阔的发展前景,在满足未来绿色能源需求方面可实现可持续性可预测性发展。扩散体增强型水平轴涡轮机可用于捕捉洋流能。过去,研究人员曾就扩散体角度变化对功率系数的影响进行了大量的数值研究。为阐明流体动力学问题并进一步验证以往计算结果,本文提议进行20.04°扩散体增强型潮汐涡轮机最佳设计实验研究。该研究于一个流速为0.7 m/s的流动水箱中进行。实验时,20.04°的扩散体的最大功率系数为0.436,略低于数值研究值。为强化20.04°扩散体的效果,该研究另制了一个10.43°的扩散体,并进行了相关实验测试。实验时,10.43°的扩散体的最大功率系数为0.303,比数值研究值低3%。本文结论如下:就多目标优化建模应用而言,数值方法尚行之有效,体现了类似于实验调查的现象。
洋流能是一种可靠的能源,有着广阔的发展前景,在满足未来绿色能源需求方面可实现可持续性可预测性发展。扩散体增强型水平轴涡轮机可用于捕捉洋流能。过去,研究人员曾就扩散体角度变化对功率系数的影响进行了大量的数值研究。为阐明流体动力学问题并进一步验证以往计算结果,本文提议进行20.04°扩散体增强型潮汐涡轮机最佳设计实验研究。该研究于一个流速为0.7 m/s的流动水箱中进行。实验时,20.04°的扩散体的最大功率系数为0.436,略低于数值研究值。为强化20.04°扩散体的效果,该研究另制了一个10.43°的扩散体,并进行了相关实验测试。实验时,10.43°的扩散体的最大功率系数为0.303,比数值研究值低3%。本文结论如下:就多目标优化建模应用而言,数值方法尚行之有效,体现了类似于实验调查的现象。
2022, 6(5): 848-858.
doi: 10.1093/ce/zkac050
摘要:
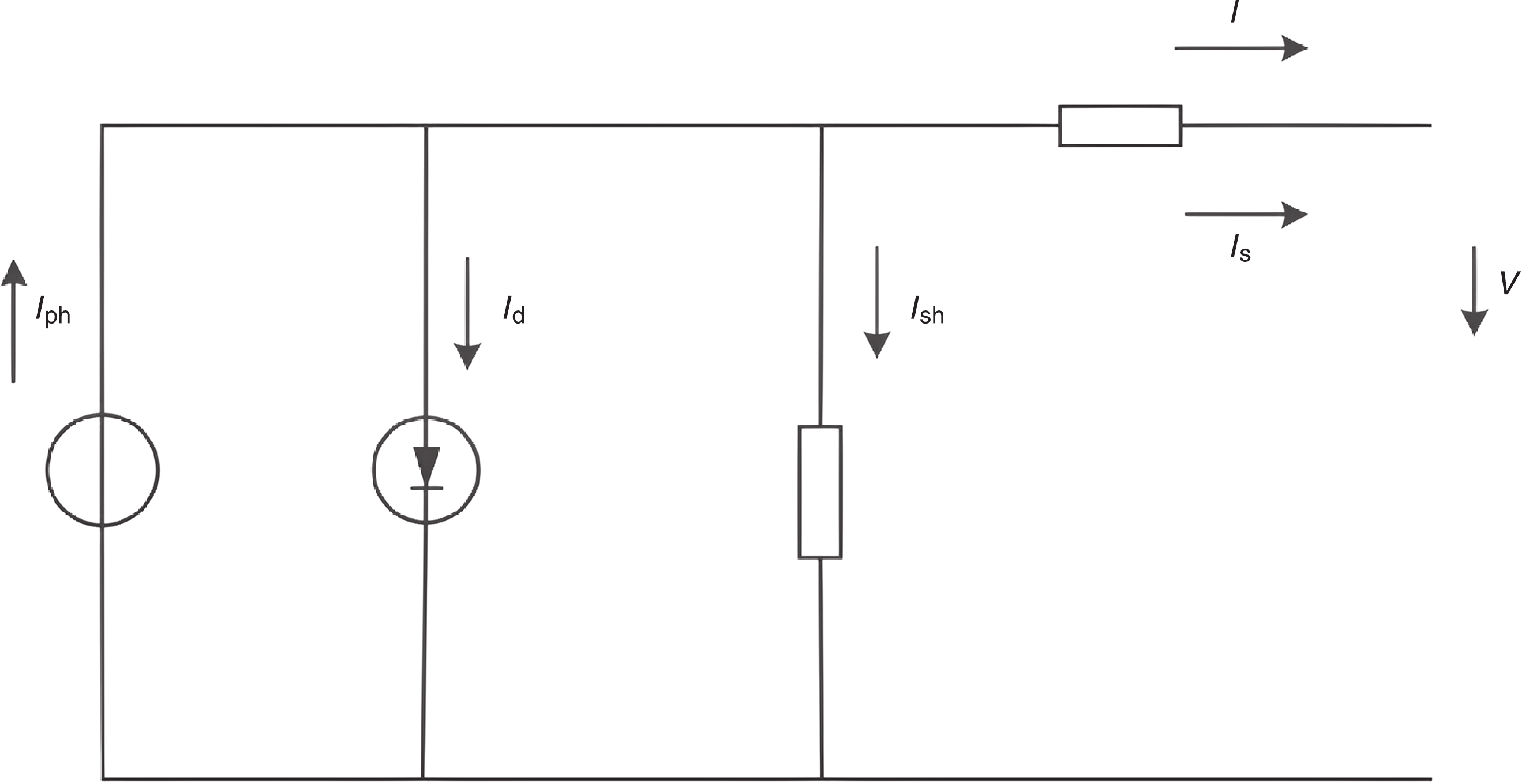
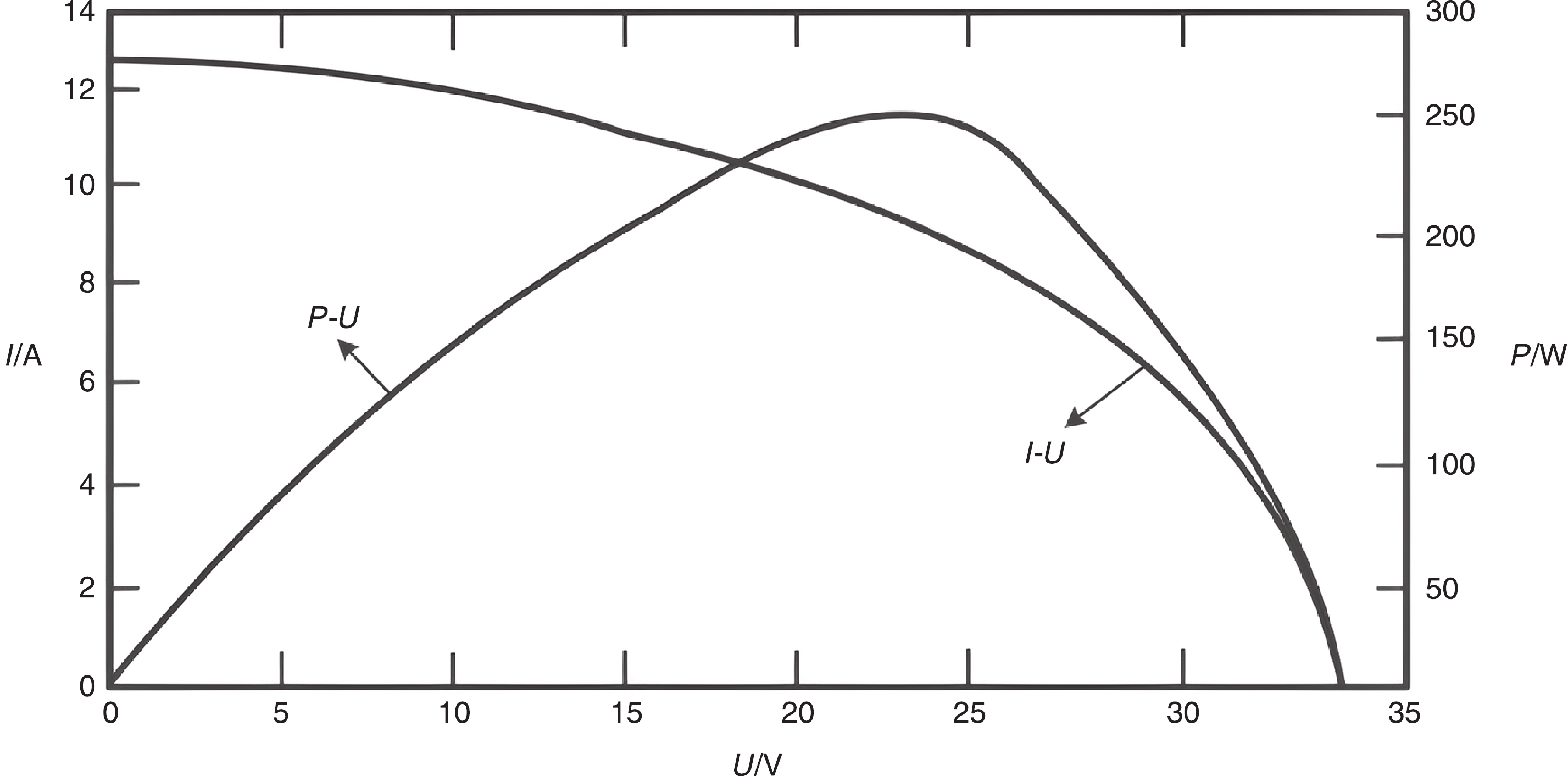
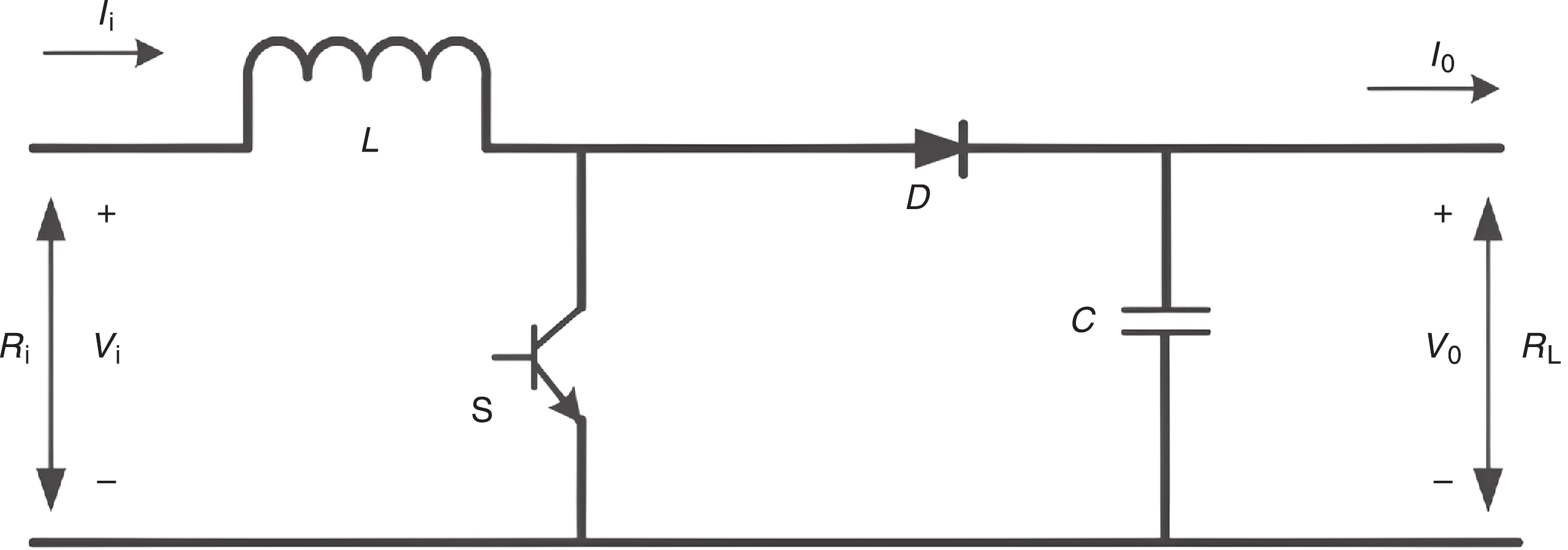
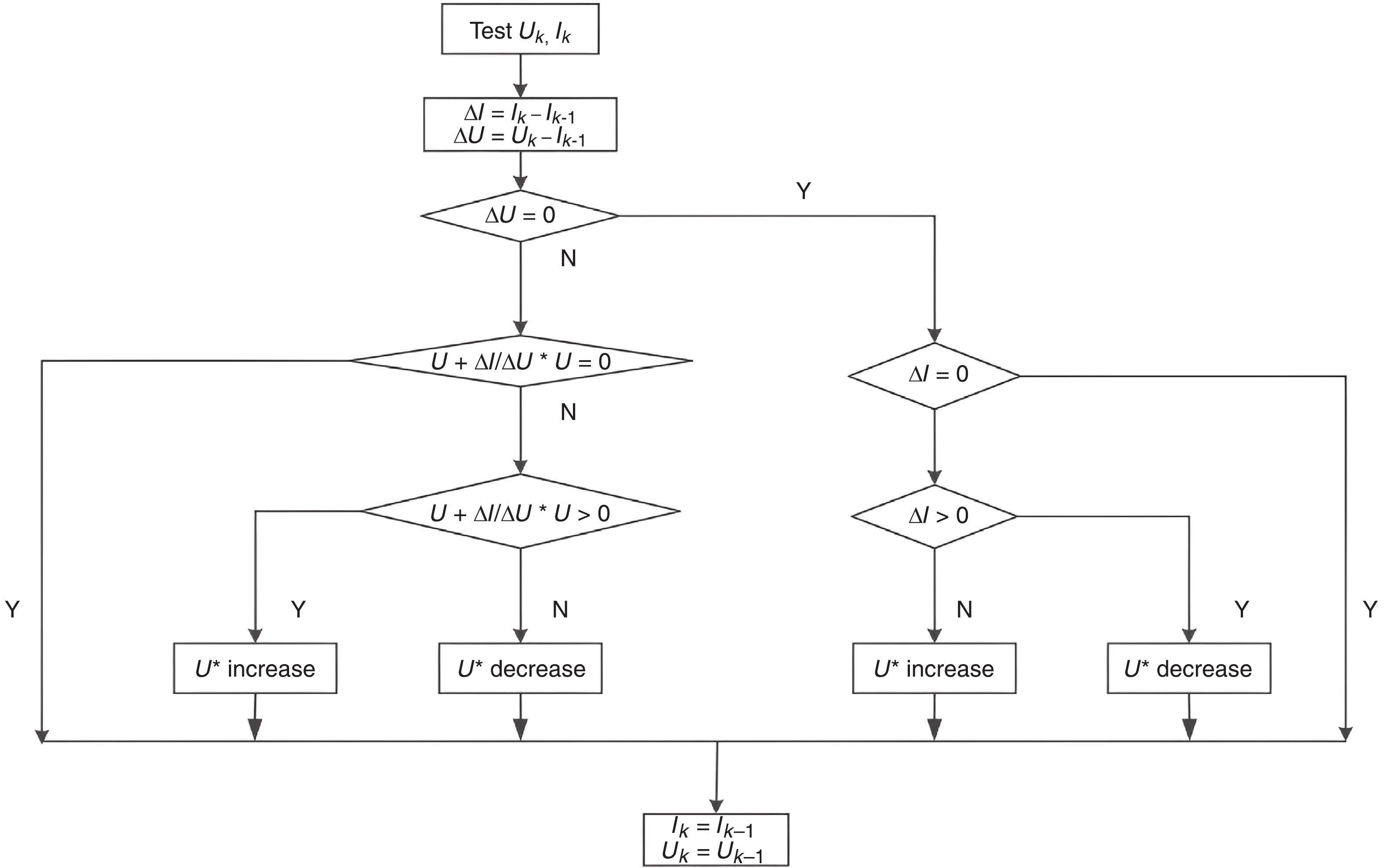
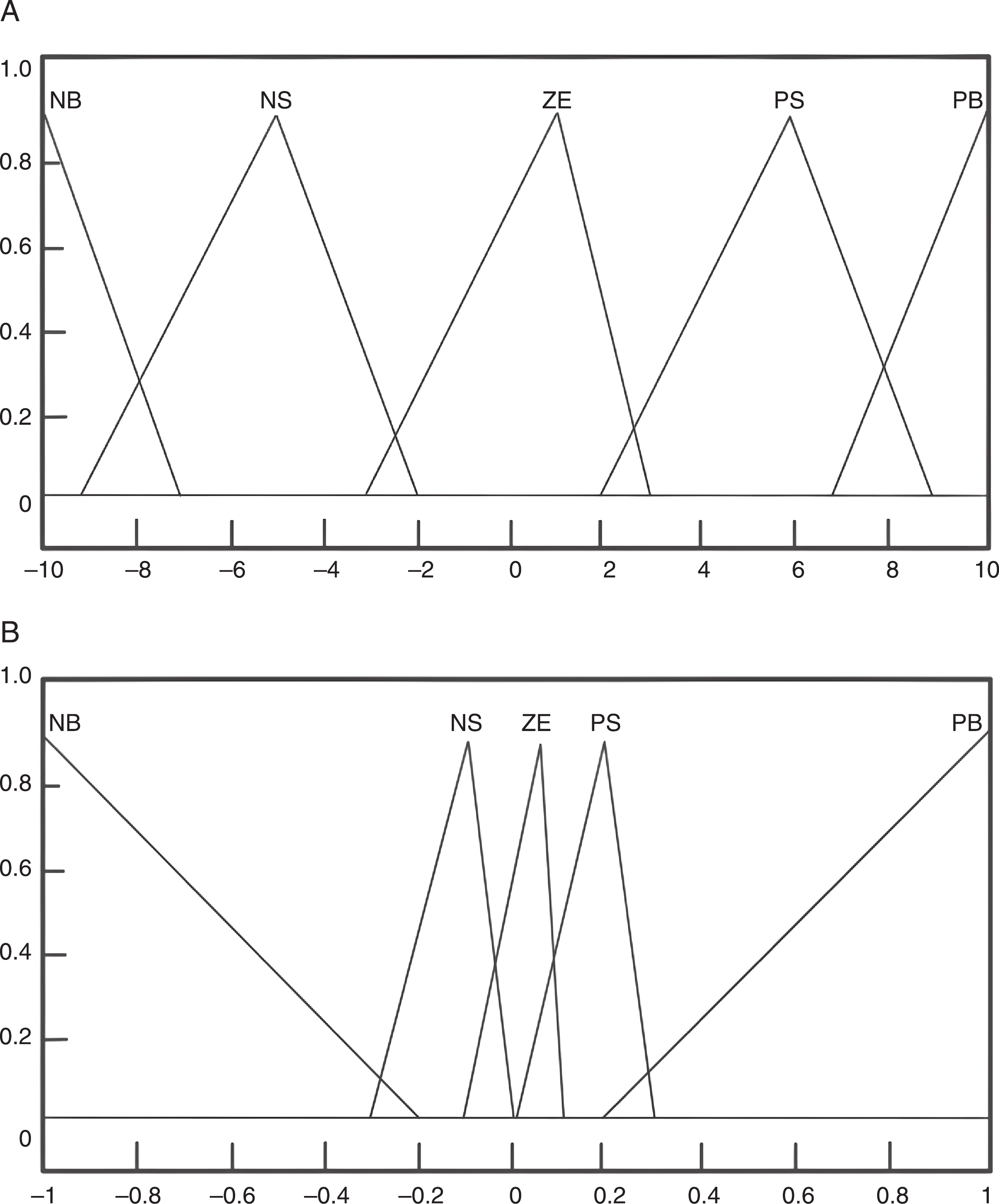
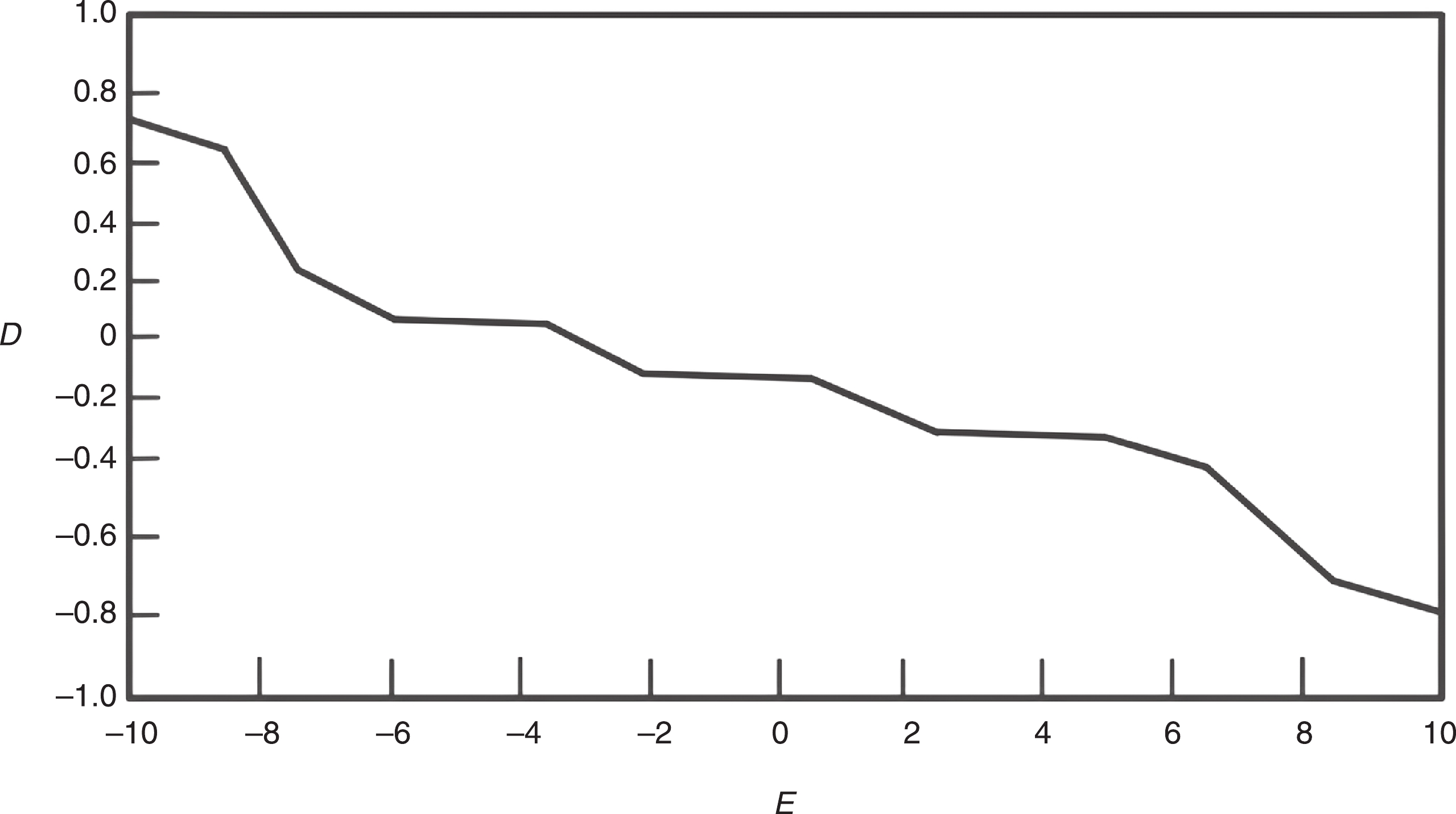
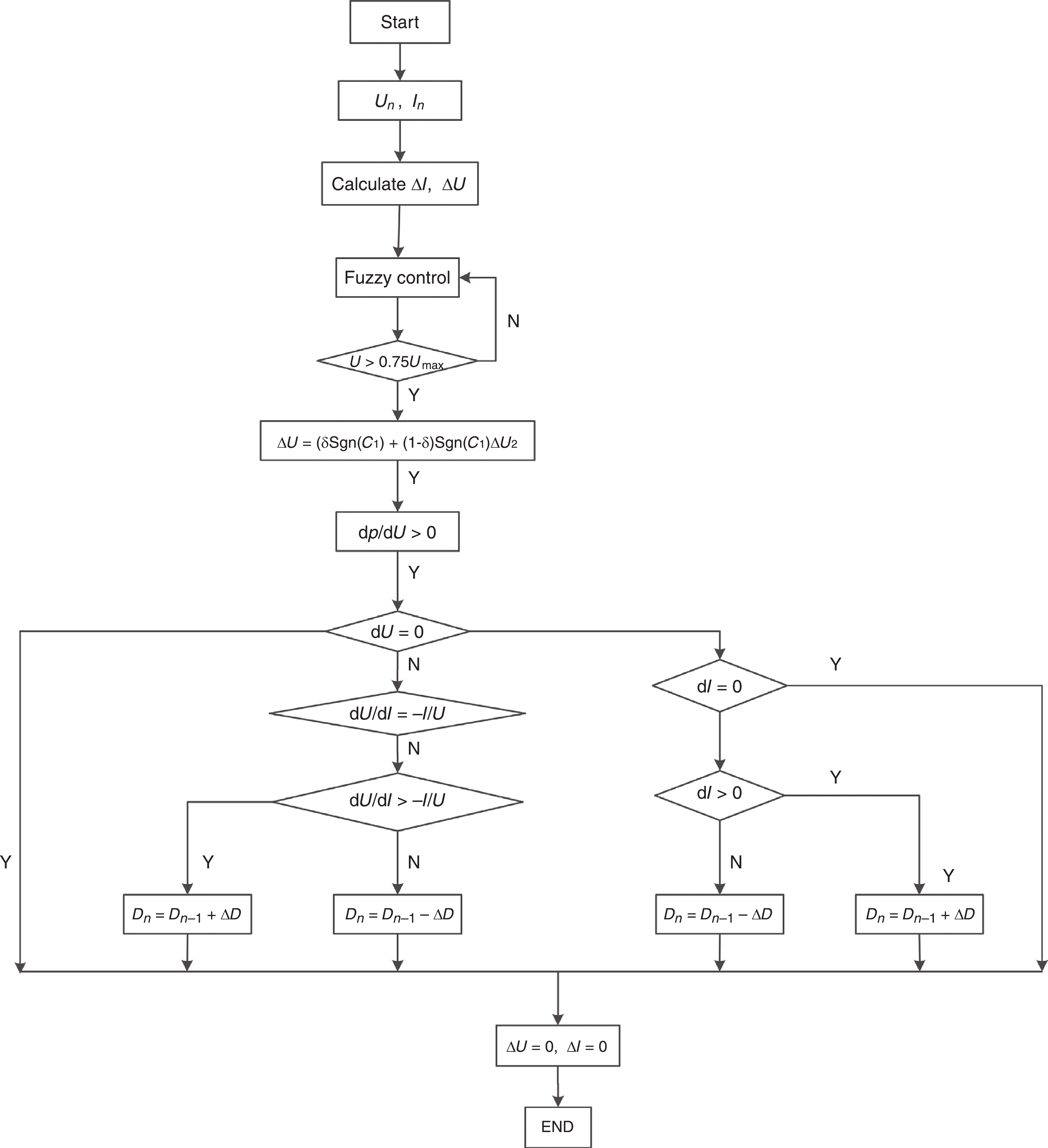
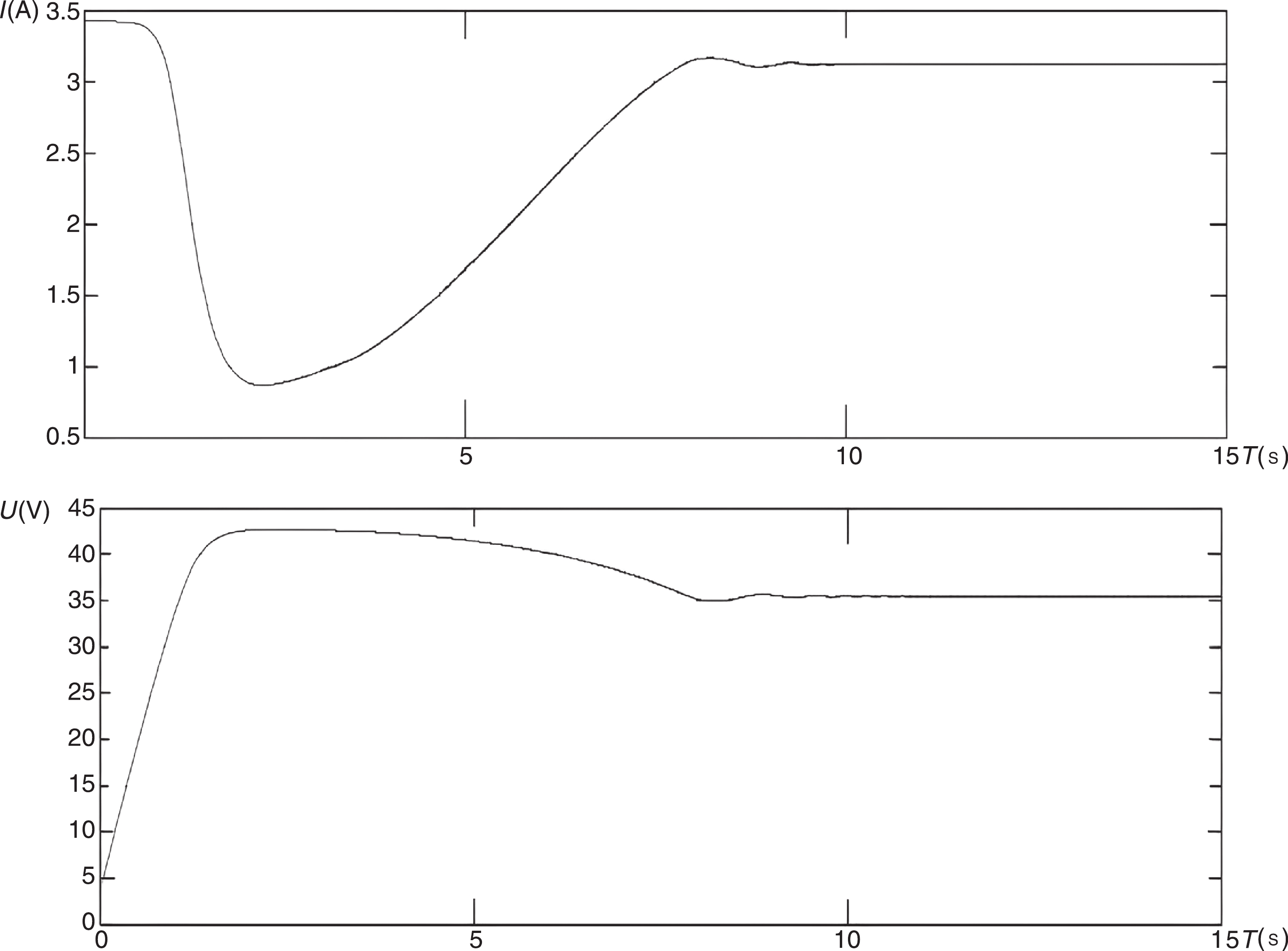
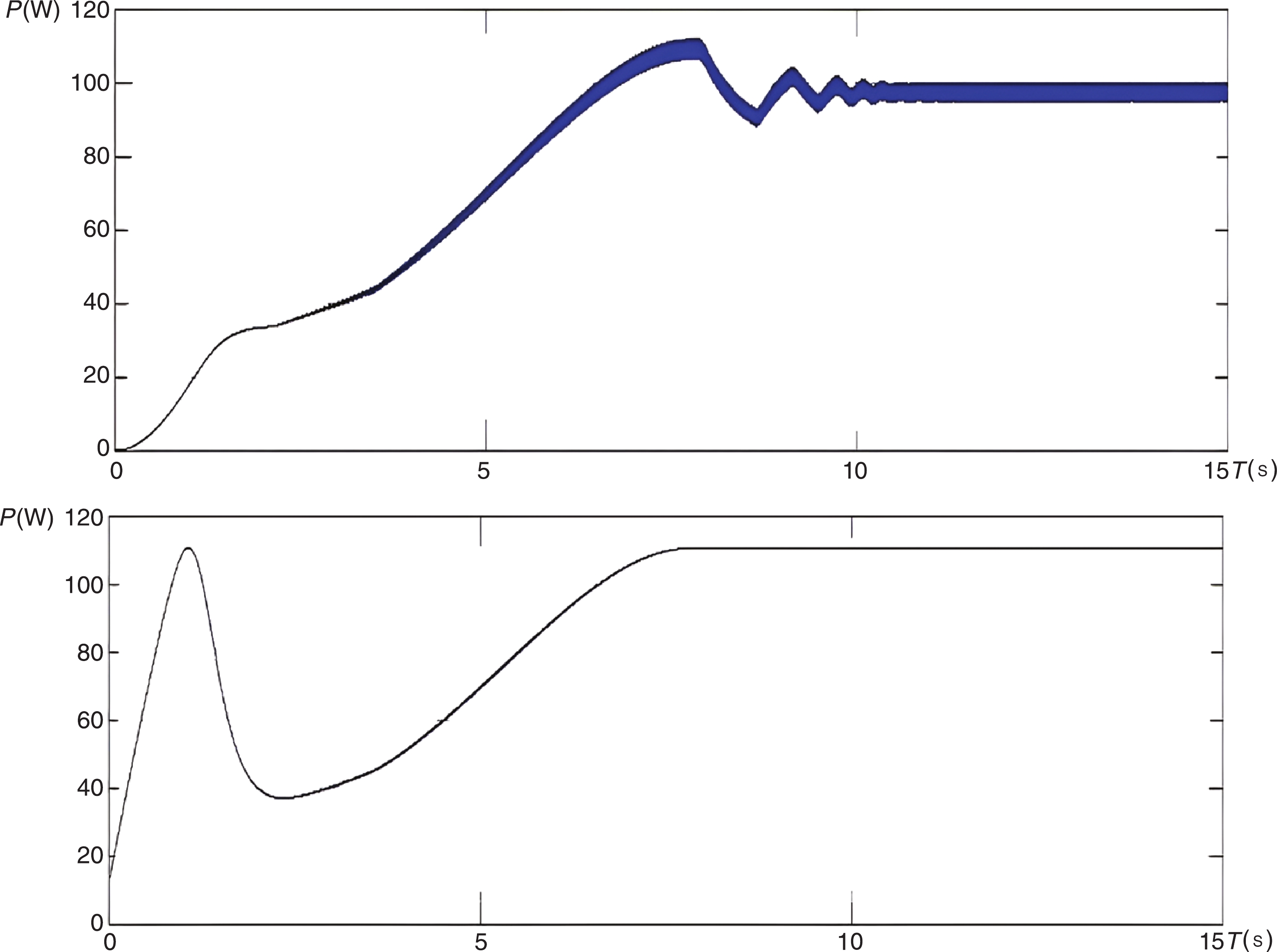
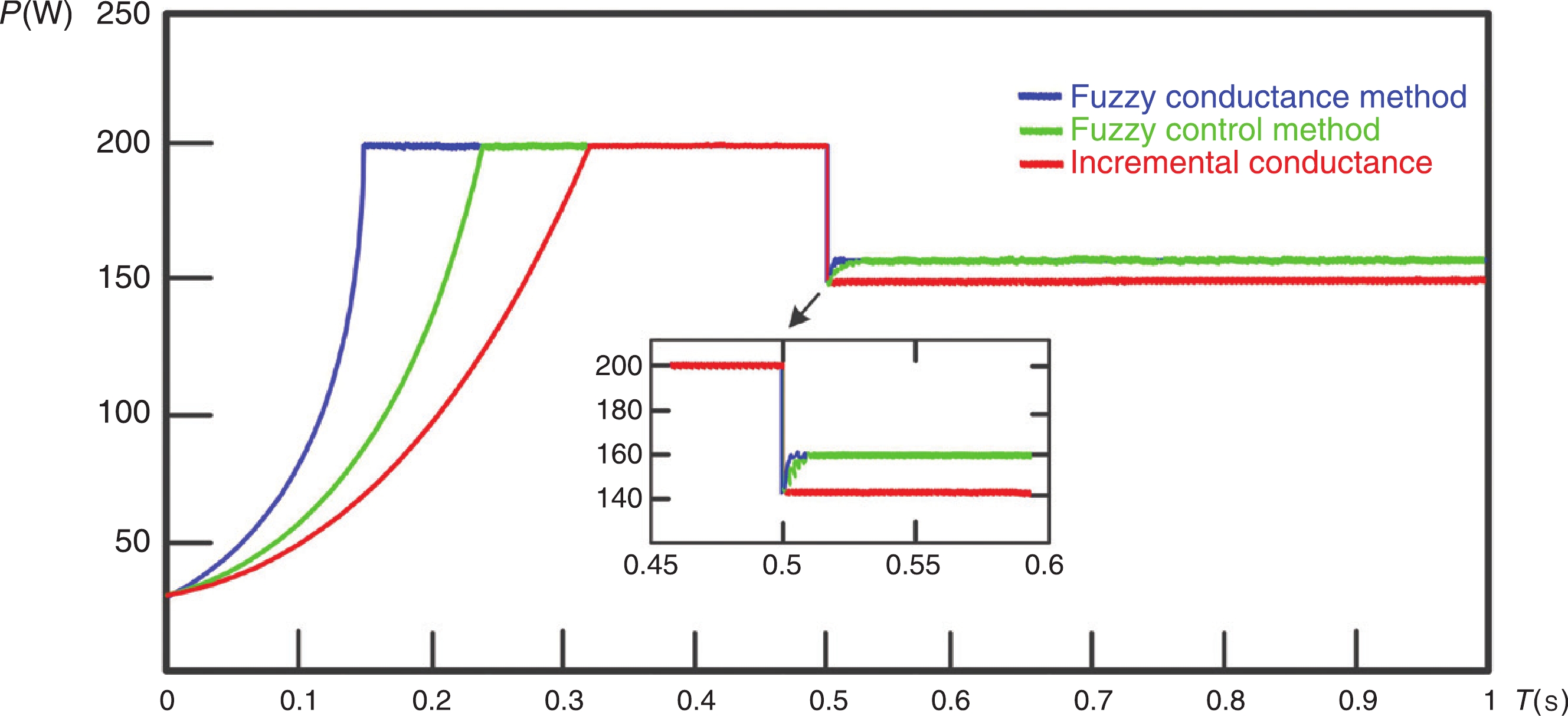
2022年,中华人民共和国国家发展和改革委员会(National Development and Reform Commission of China,NDRC)宣布将积极推进碳达峰碳中和。日臻完善的光伏(PV)开发技术凸显了产业优势,逐年增长的PV发电量也大大促进了光伏发电行业的发展。经比较现行的最大功率点(MPP)智能跟踪与传统控制算法,本文结合了传统模糊控制法与电导增量法,提出了一种以分区变步长提高MPP跟踪速度的优化算法。为解决理想微分方程所致MPP附近的振荡问题,本文于小步长的判断条件中引入了一个不完全偏微分方程。本文于MATLAB®/Simulink®中建立了仿真模型,并在特定条件下仿真了本文提议方法。经分析电导增量法、模糊控制法、模糊-电导法三个仿真周期的振荡过程数据,研究发现相比于另外两种方法,模糊-电导法首次达到MPP所需时间分别缩短了0.21 s及0.14 s,且环境骤变所致振动损失分别减少了6.5%及3.1%。由该仿真结果可知,改进型模糊-电导法既优化了稳态振荡问题,又提高了PV发电效率。经比较传统控制算法,改进型模糊-电导法的可行性与有效性得以验证。
2022年,中华人民共和国国家发展和改革委员会(National Development and Reform Commission of China,NDRC)宣布将积极推进碳达峰碳中和。日臻完善的光伏(PV)开发技术凸显了产业优势,逐年增长的PV发电量也大大促进了光伏发电行业的发展。经比较现行的最大功率点(MPP)智能跟踪与传统控制算法,本文结合了传统模糊控制法与电导增量法,提出了一种以分区变步长提高MPP跟踪速度的优化算法。为解决理想微分方程所致MPP附近的振荡问题,本文于小步长的判断条件中引入了一个不完全偏微分方程。本文于MATLAB®/Simulink®中建立了仿真模型,并在特定条件下仿真了本文提议方法。经分析电导增量法、模糊控制法、模糊-电导法三个仿真周期的振荡过程数据,研究发现相比于另外两种方法,模糊-电导法首次达到MPP所需时间分别缩短了0.21 s及0.14 s,且环境骤变所致振动损失分别减少了6.5%及3.1%。由该仿真结果可知,改进型模糊-电导法既优化了稳态振荡问题,又提高了PV发电效率。经比较传统控制算法,改进型模糊-电导法的可行性与有效性得以验证。







 扫一扫,关注我们
扫一扫,关注我们